基于上海交通大学强化学习课程系列课程学习RL的笔记.
SJTU RL Course (wnzhang.net)
此为第二讲的内容, 主要讲述了马尔科夫决策过程MDP的概念, 并给出了策略度量, 策略值函数, 基于值函数进行策略提升的内容.
MDP
!!Attention!!
在下面的描述中, 我们会用大写字母来表示随机变量, 使用小写字母来表示随机变量的具体取值
如使用来表示随机变量"t时刻的状态", 而用来表示t时刻所取到的具体状态.
同时, 在取期望时, 若不加说明, 则是对方括号内的随机变量取期望.
随机现象与随机过程
对于世界中的各种随机现象, 我们可以用概率论的方法对其进行建模, 如用随机变量 / 随机向量对某个随机事件进行描述等.
- 用伯努利分布描述硬币的正反面
- 用多项分布描述多次投掷硬币后, 正面朝上的硬币数量
- 用高斯分布来描述许多的物理现象
对于随机现象的描述能够帮助我们解决一些问题, 但是在某些场景下, 我们会将一系列随机事件整体性地考虑, 将它们视为"随机过程", 并用
来描述它们.
- 例如: 天气的变化, 足球比赛, 生态系统的演进等.
- 这些过程中, 我们认为某个时刻的状态分布, 会受到历史状态的影响.
随机过程是一个或多个事件、随机系统或者随机现象随时间发生演变的过程
- 概率论研究静态随机现象的统计规律
- 随机过程研究动态随机现象的统计规律
* 一些发散
- 随机过程的建模包含的理念是: 我们假定在给定历史状态的前提下, 下一个状态的概率分布是确定不变的.
- 我们可以考虑"决定论"观点的建模, 来描述一个"确定性过程", 即在给定所有历史状态的前提下, 下一个状态是确定性的. 此时, 形式化的, 这个过程可以通过映射来描述. 相比于"随机过程"的建模, 这是一个更强的假设.
- 同样的, 我们可以考虑描述一个"强随机过程". 这时我们假定, 给定所有历史状态的前提下, 当前状态的分布的分布是确定的. 显然, 此时给定的是一个更弱的假设, 建立的是更加复杂的模型, 描述起来也更加复杂.
- 当然, 我们也可以假定一个更复杂的图景: 即, 不仅当前状态的分布是不确定的, 而且当前状态的分布的分布也是不确定的. 这个过程可以一直进行下去, 没完没了.
- 真正的物理世界究竟服从怎么样的模型呢? 我不得而知. 但是, 这些模型对于解决某些具体问题而言是很有用的.
总而言之, 对于"随机过程"的建模已经有些过于强大, 也过于复杂了. 因而我们往往做出妥协, 考虑弱一些的特殊形式, 即马尔科夫过程
马尔科夫过程 Markov Process MP
对于某些特殊的随机过程, 即马尔科夫过程, 我们假定
- 状态从历史(history)中捕获了所有相关信息
- 当状态已知的时候,可以抛开历史不管
- 也就是说,当前状态是未来的充分统计量
此时, 我们有
显然, 虽然MP过程中状态的转移可以无穷无尽地进行下去, 但是在给定了一个MP之后, 每个状态的概率分布都是确定的, 换言之, 给定MP后, 就相当于给定了一系列随机变量的分布.
理论上, 我们可以任意地给出的具体分布. 但是在实际中, 对于稍微复杂一些的MP, 这个具体分布往往就处于黑箱状态.
马尔科夫过程 Markov Reward Process MRP
- 在马尔可夫过程的基础上加入奖励函数和折扣因子,就可以得到马尔可夫奖励过程(Markov reward process)
- 相比于马尔科夫过程, MRP在每个状态都会有一个对应的奖励, 其随机变量记为 . 显然, 它可以通过 和 来导出, 即
对于某个的状态序列, 我们定义该序列的回报为
显然
- 定义的 是一个与序列相关的随机变量.
- 在给定了一个MRP的情况下, 其任意时刻的回报 的分布是确定的, 期望奖励 也是确定的.
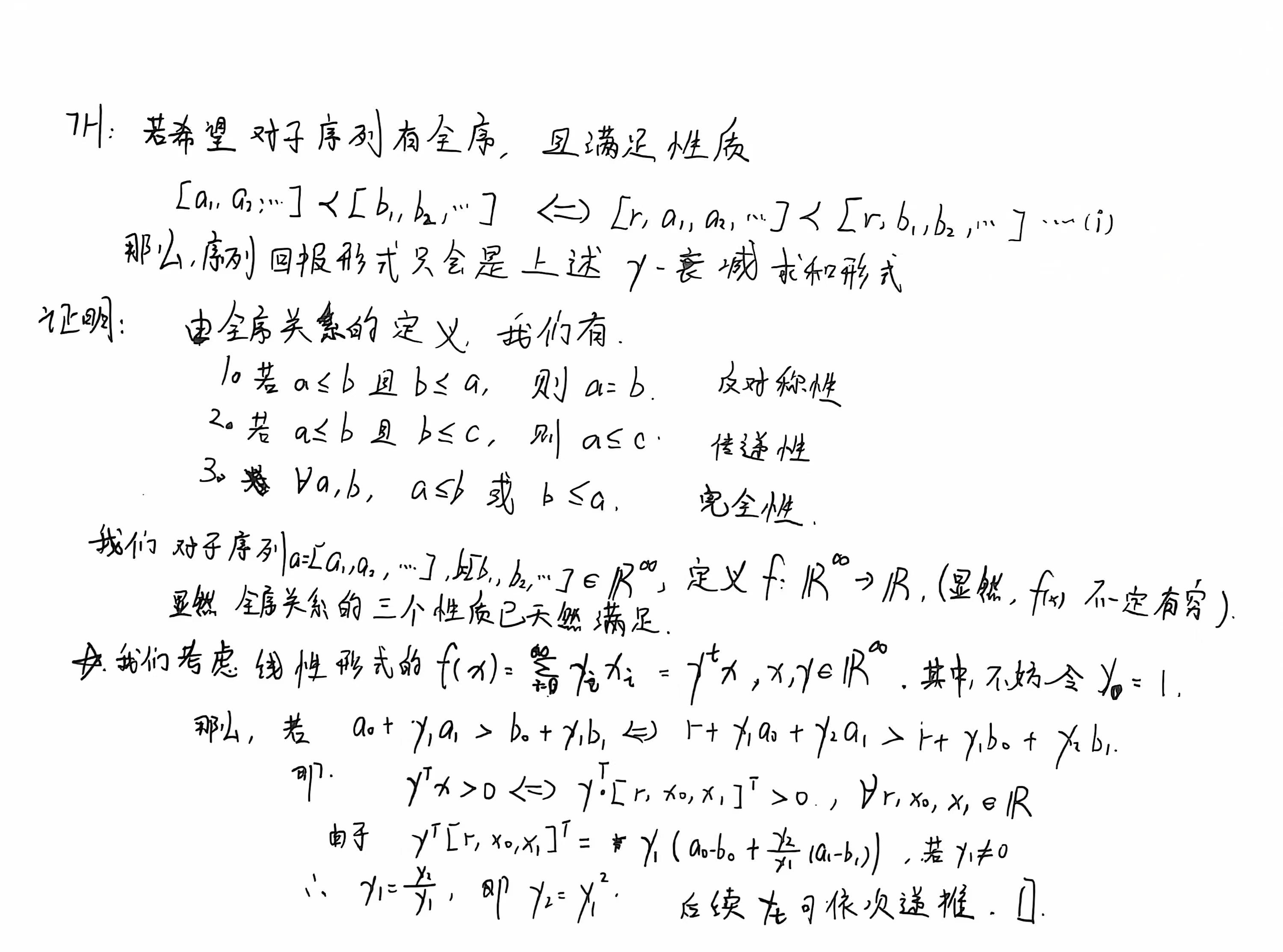
序列回报的形式
上述等比衰减的回报形式有什么好处呢? 大致可以分为两个方面
- 一定程度上保证了总体回报值 的收敛性
- 保证了 具有序关系上的良好性质
对于收敛性,
- 让我们假设当前还没有确定序列回报是按照上述过程进行衰减的.
- 此时, 对于某个序列 , 我们有一个回报序列 .
- 那么, 我们就要考虑给出一个对应的实数随机变量 , 用它来整体性的描述上述序列的"好坏"
我们可以发现如下的事实
- 对于MP过程, 即使它是一个无穷的过程, 由概率的性质也可以天然地保证最终的概率分布 是收敛的
- 但是对于MRP过程, 最终得到的"总体回报" 却不一定是收敛的. 例如, 我们考虑对回报序列进行简单求和操作. 那么, 倘若 恒成立, 在 时总回报就趋于无穷.
- 此时, 若我们考虑有限状态的MRP, 同时考虑等比衰减的求和形式, 此时得到的 就是收敛的了.
进一步考虑之后, 我们发现:
- 对于给定序列, 实际上我们并不关心具体得到的 的值
- 相反, 我们关心的是 之间的大小关系. 因为我们实际上是想要凭借大小关系, 来比较两个序列之间的好坏
- 因此, 比起考虑具体数值的性质, 我们更多地考虑它确定的序关系所具有的性质.
对于序关系, 我们给出如下定理:
TODO: 为何选定线性形式呢? 这一点没太想明白, 还需要进一步考虑.
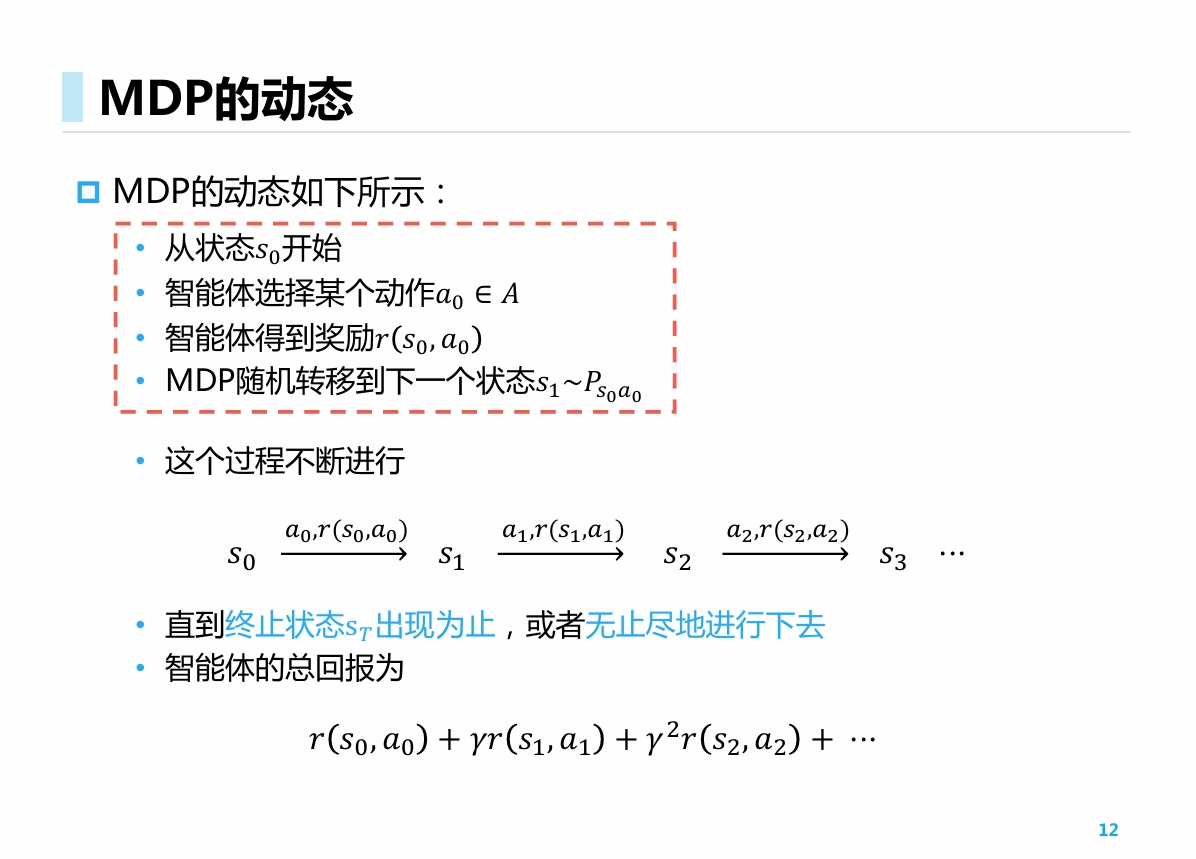
马尔可夫决策过程 Markov Decision Process MDP
- 给定一个MRP, 我们将其作为环境的建模
- 同时, 我们加入策略的建模. 此时环境状态的转移不再完全取决于环境, 而有部分取决于决策者的动作
- 即,
MDP形式化地描述了一种强化学习的环境
- 环境具备完全的可观测性
- 即, 当前状态可以完全表征过程, 下一个状态可以完全地由当前的状态决定(马尔可夫性质)
* 在某些时候, 下一个观测量不一定由之前的观察量来决定. 但是别忘了, "状态 "与"观测 "并不等同. 状态可以是历史观测序列和动作序列进行复杂的作用而得出的结果.
因此, 对于很多的过程, 我们都可以假定其具有状态的马尔科夫性质, 此时观测的马尔科夫性质往往不必满足
形式化地, 对于一个MDP, 我们如下五元组进行描述
- : 状态集合
- : 动作集合
- : 状态转移概率, 也作
- : 对未来奖励的折扣因子
- : 奖励函数
* 此时我们考虑的奖励函数是一个确定性的映射; 对于某些情况, 奖励函数也可以服从一个分布. 此时我们往往考虑当前期望. 例如对于多臂老虎机的奖励建模就是这种情况.
- 对于一个给定的MDP和给定的策略, 所有的随机变量的分布也是完全确定的.
- 我们可以通过从初始状态开始, 不断进行转移复合, 来求解所需要求解的随机变量
- 但是实践当中, 由于状态转移过于复杂, MDP过程具体分布往往不可见, 处于黑箱状态
RL vs ML
对于传统的ML(SL, UL),
- 我们考虑的是
- 此时, 我们进行采样的分布 是确定的, 而要求期望的目标 是不确定的, 随参数不同而变化的
- 此时对于打分函数, 其中的 往往是黑盒的, 不可导出的(如深度神经网络)
对于RL, - 我们考虑的是
- 此时, 我们进行采样的分布 是不确定的, 随参数不同而变化的, 而要求期望的目标 是确定性的
- 此时对于样本服从的分布 , 其中的 和 往往都是黑盒的. 两层黑盒进行交互, 叠加在一起, 带来了比传统ML更大的挑战

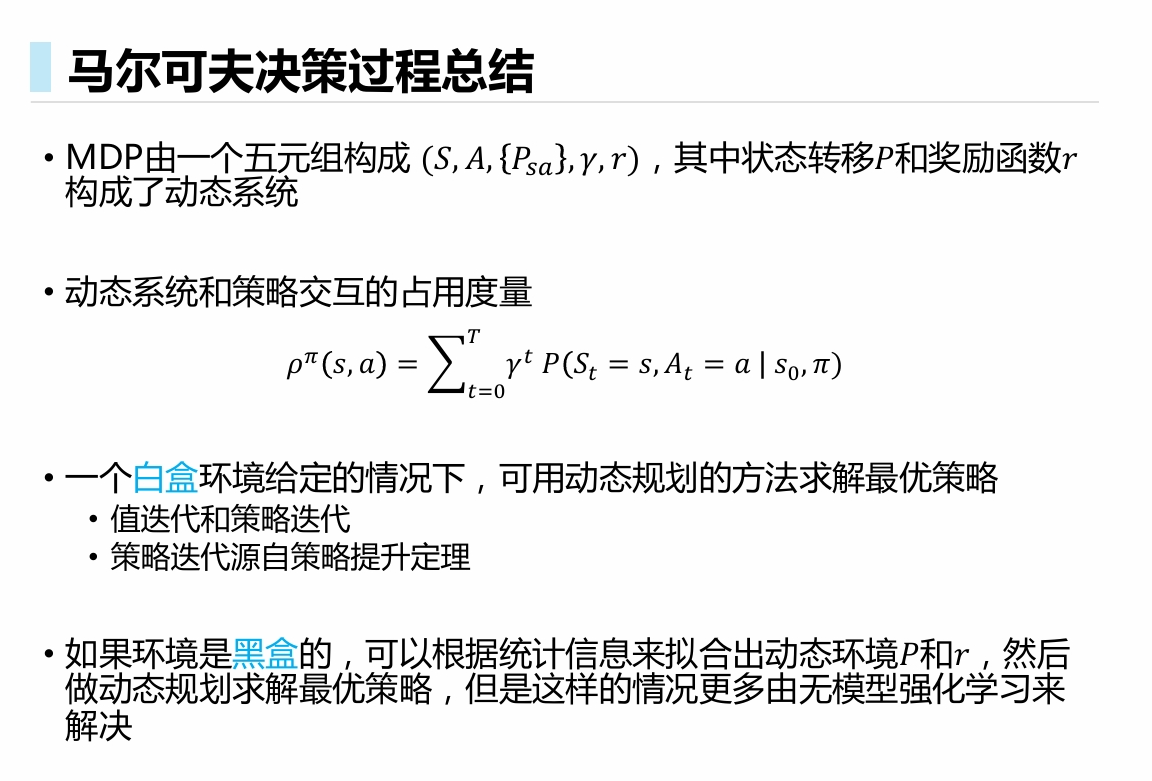
- 对于给定的MDP, 不同的策略会采样出不同的序列对, 策略与序列对在随机变量的意义下一一对应.
- 对于某个策略及其采样出的序列对, 我们定义占用度量(Occupancy Measure)对它们进行描述
- 第一行告诉我们, 接收一个给定的状态-动作对, 返回一个随机变量的期望值
- 第二行中, 理论上我们应当连带着随机变量一起考虑. 但是由于的分布与策略无关, 仅由环境决定, 因此我们可以将其作为固定的给定量看待.
- 此处定义的等比衰减求和的形式, 是为了后面定义值函数时, 与MRP的奖励的衰减求和相吻合
状态占用度量
给出如下两个定理:
TH1:
和同一个动态环境交互的两个策略 和 得到的占用度量 和 满足
TH2:
给定占用度量, 可生成该占用度量的唯一策略是:
证明:
TH1根据TH2不难得到;
对于TH2, 考虑如下事实
那么, 对于某个给定的占用度量, 都被确定, 策略当然也是唯一确定的.
更加严谨的证明: U. Syed, M. Bowling, and R. E. Schapire. Apprenticeship learning using linear programming. ICML 2008.
上面两个定理告诉我们:
- 策略与占用度量是完全的一一对应关系, 是描述同一个东西的两种语言, 互相之间完全等价
定义策略的累积奖励为
- 其中, 第二个等号将期望吸收进了占用度量当中; 第三个等号是RL中的一个简写形式.
- 强化学习的目标就是最大化上面的累计奖励, 给出使得累计奖励最优的那个
- 由于策略与占用度量的关系是黑盒的, 改变策略后, 无法很快得到新的占用度量
- 因此, 上面的等式没有给出具体的策略优化方法.
策略评估与策略提升
- 首先, 我们会推广前面的描述方法, 给出状态价值函数和动作价值函数的定义.
- 在定义了上面这些更强的描述手段后, 我们可以进一步定义"策略提升"的概念. 此时, 我们考虑的是"只利用"的确定性策略
- 在这之后, 我们证明策略提升定理, 这个定理告诉我们, 贪婪地对策略进行更新是能够导出全局最优的结果的.
- 于是, 我们通过贪婪更新的方法, 给出一个策略提升的实际操作过程.
- 然后, 我们证明, 对于非确定性的, 综合探索与利用的-greedy策略, 并证明此时定理依然成立 (对于策略的更新过程中, 改变动作分布这一步骤, 可以探讨其他更改方式)
策略值函数估计(Policy Evaluation)
- 状态价值
- 动作价值
显然, "状态价值函数"是"策略累计奖励"的推广形式, 而动作价值函数可以看做状态价值函数的自然延伸.
对于两个策略 , 定义策略提升:
注意: 上述不等式中, 采用的价值函数始终是原始策略 的价值函数. 因此, 某种程度上这是一种局部的最优性质.
我们关心的是, 这种局部最优性能否导出全局上的最优
下面, 我们给出策略提升定理, 它告诉我们, 这种局部到全局的最优性转换是成立的.
策略提升定理(Policy Improvement Theorem)
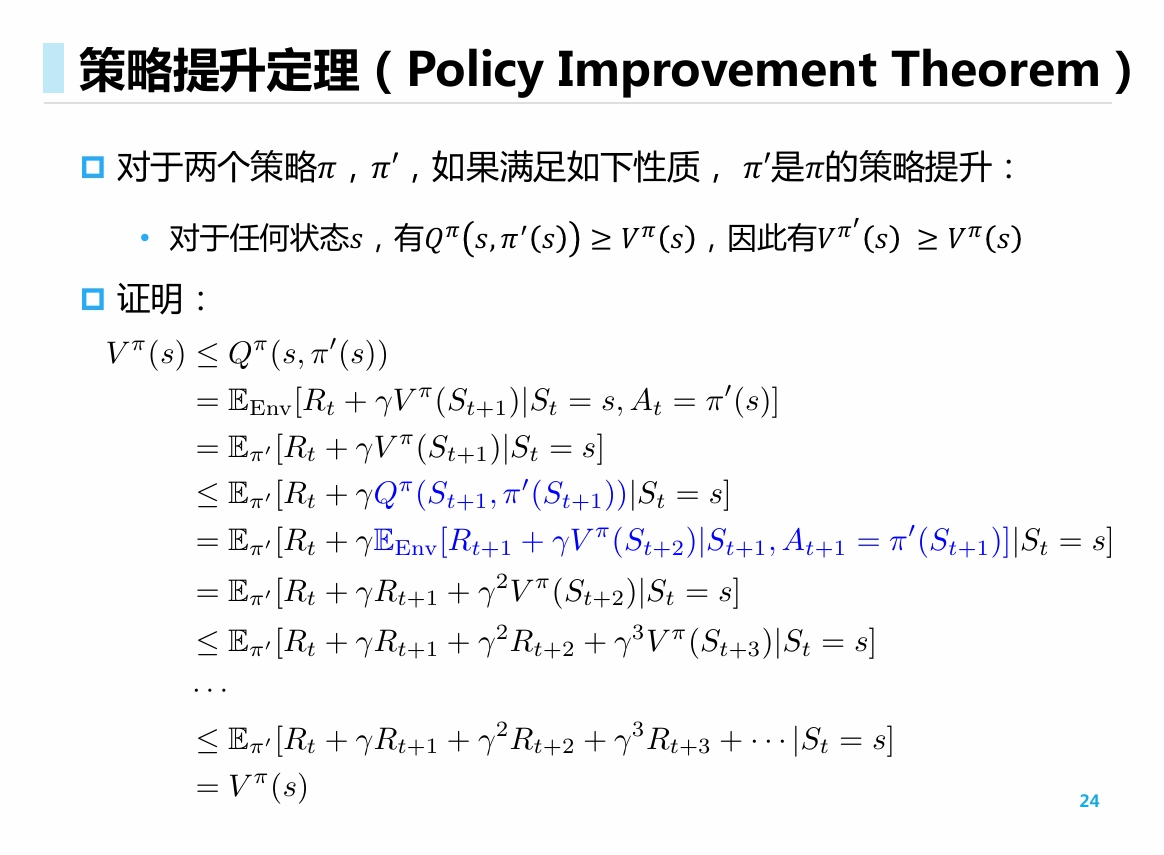
- 定理的证明过程反复应用了值函数定义和马尔科夫性质. (有些类似在优化问题中, 凸函数的性质: 局部最优解就是全局最优解. )
- 马尔科夫性质:
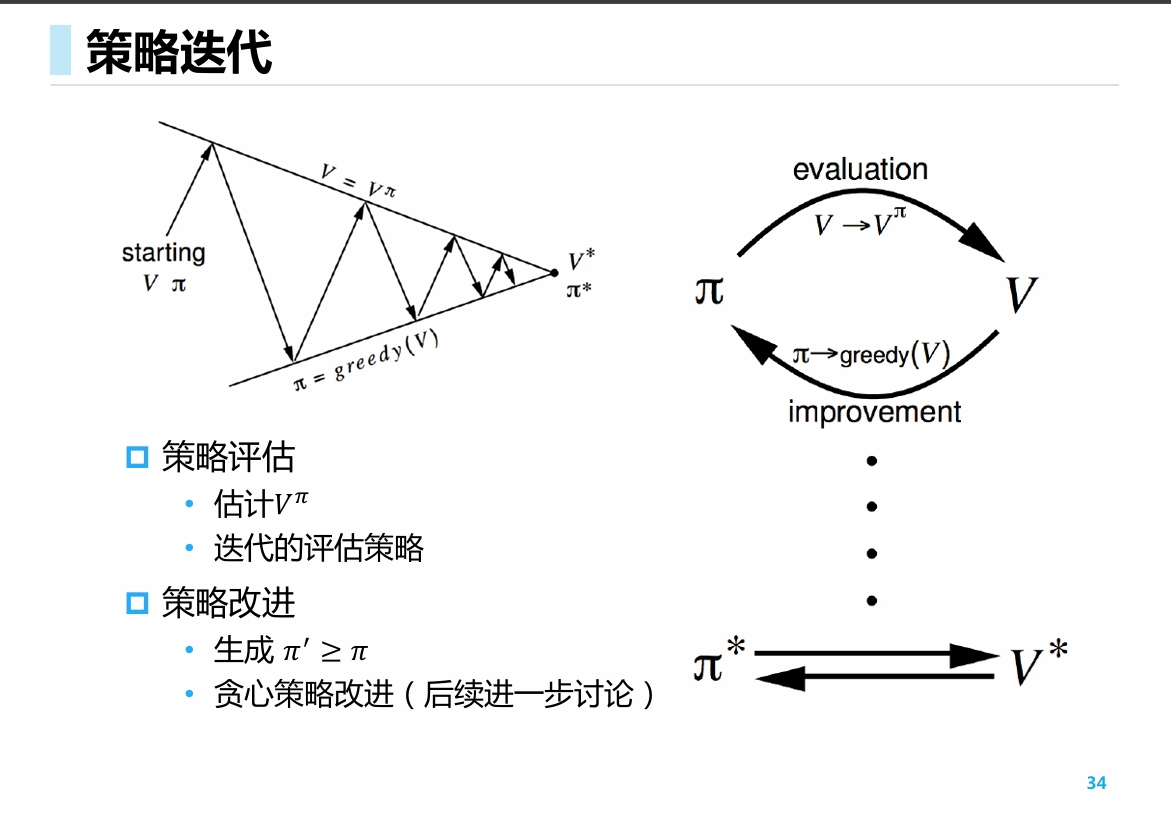
于是, 我们就得到一个进行策略提升的范式:
- 给出策略 (这一步是简单的)
- 评估策略价值 (这一步是困难的)
- 根据当前策略价值寻找局部最优解, 获取新策略 (这一步是简单的)
反复进行, 直至收敛.
策略提升定理 - 在-greedy场景下
- 前面的讨论中, 我们考虑的策略是确定性的, 对于给定的状态, 它会确定性地返回某个动作.
- 对于确定性策略进行更新时, 我们简单地将其返回值更改为当前最优解;
- 倘若我们采用一个 -greedy的策略, 它有 的概率随机返回动作, 那么情况会不会有变化呢?
答案是, 在这种新的策略下, 策略提升定理和"评估 - 提升"的范式依然是成立的.
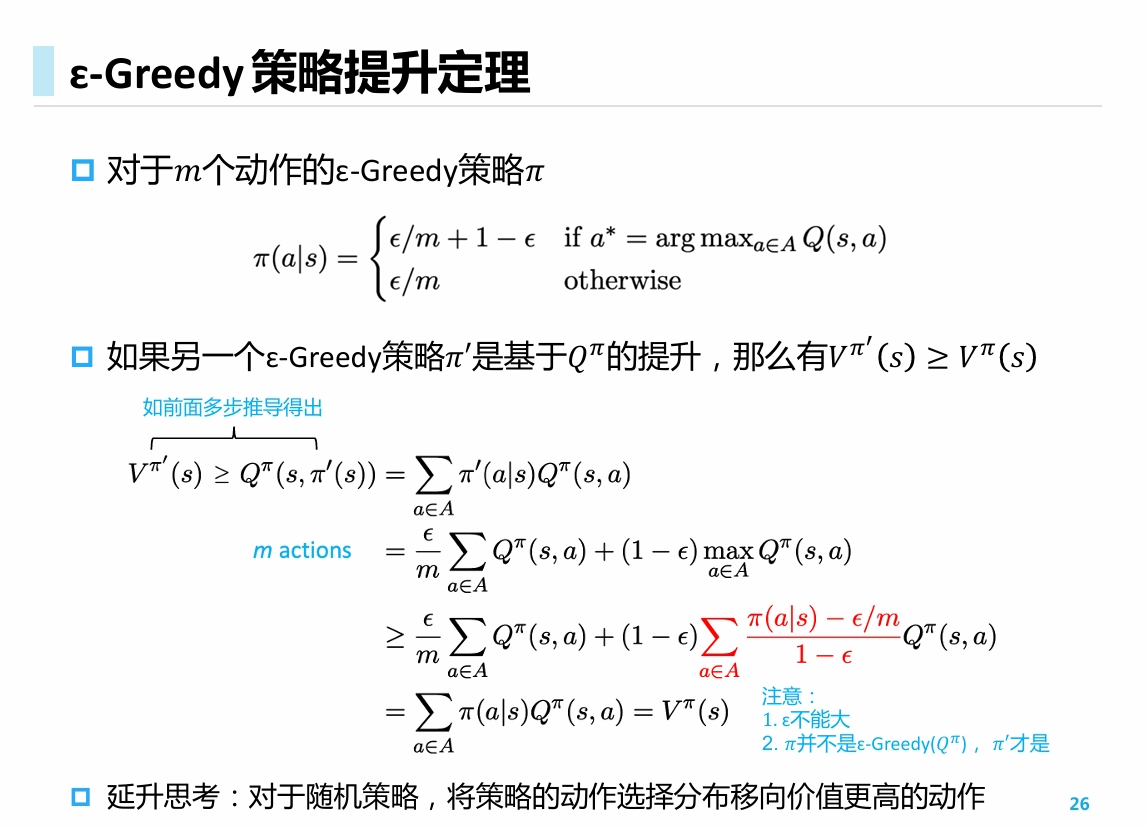
- 证明中, 不等式的那一行, 本质上做了一个加权平均. 显然加权平均得到的结果不会超过最大值.
- 延伸: 对于任意的策略, 我们有可能采用更多样的方式去改变策略的动作选择分布, 而不仅仅是移动-greedy分布中的greedy项.
基于动态规划的强化学习
前面几节中, 我们完成了理论上的一些分析, 并得到了一个提升范式; 现在, 我们介绍运用一个运用动态规划方法的具体实现.
- 状态价值
- 动作价值
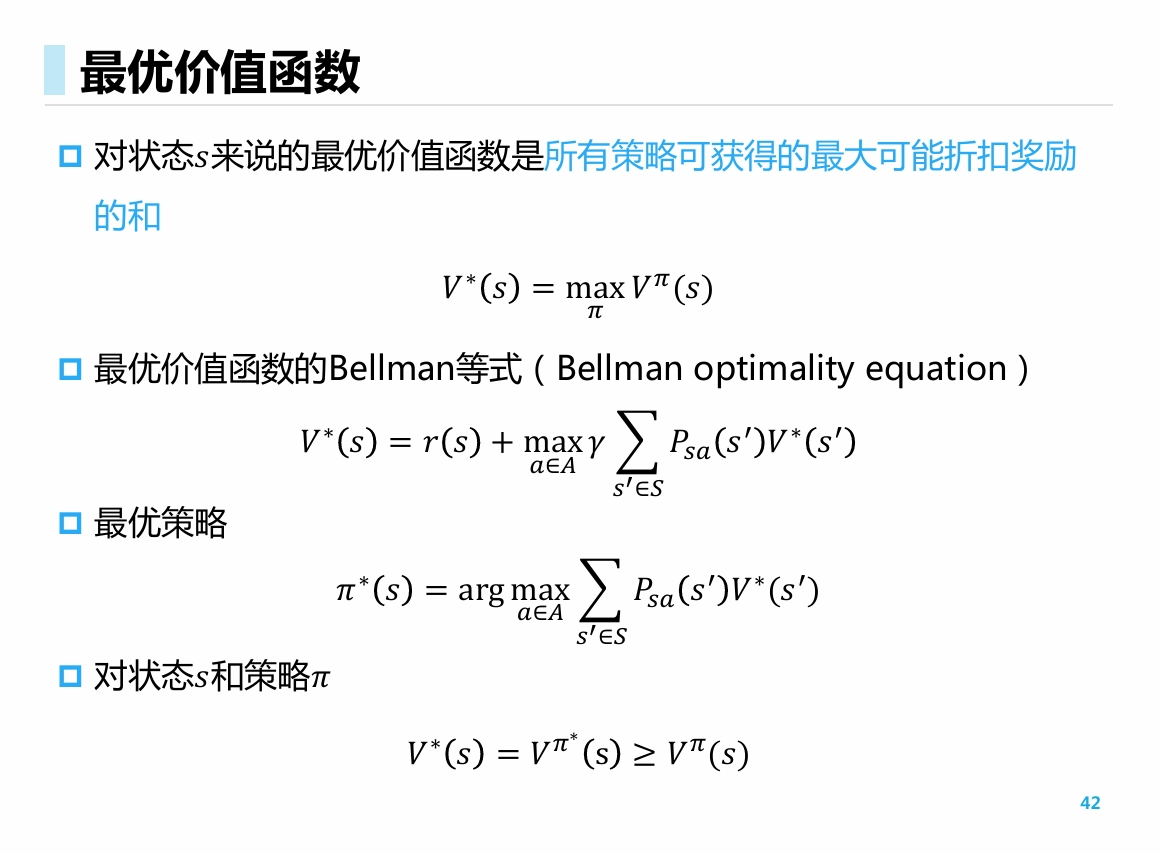
关于策略和值函数, 我们有以下事实
- 价值函数和策略在优化问题上一一对应. 最优策略的值函数一定是最优的; 给定最优的价值函数, 可以采用 的方式导出最优策略
- 寻找优化策略的方法有两种:策略迭代和价值迭代
此处, 我们先不加证明地给出如下两种方法, 它们都应用了动态规划的方式, 通过策略迭代和价值迭代对最优策略进行求解.
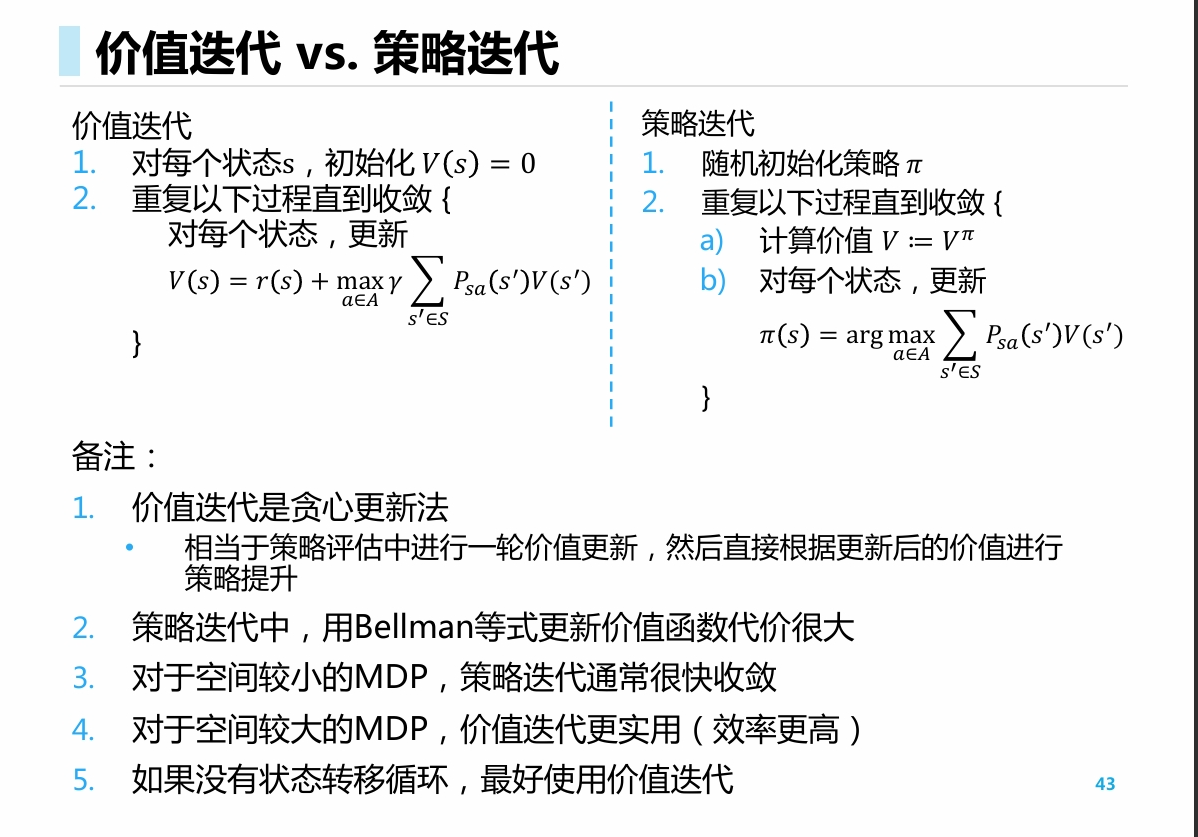
其中
- 迭代可能是同步的: 存储两份价值函数; 也可能是异步的: 只存储一份价值函数.
- 策略迭代在直观上更加自然; 值函数迭代可以看做是只进行一步评估的策略迭代
- 两种方法的收敛性都经过了证明
我们需要证明: 在任意给定的初始策略下, 不断地进行如上操作, 最终结果一定收敛, 程序一定会终止, 且结果一定是最优解.
其中, 收敛性的证明分为两个方面:
- 求解价值函数时, 求解的过程是收敛的
- 不断更新策略时, 更新的过程是收敛的
具体而言, 对于这两个算法, 我们分别考虑了两个算子, 并证明了它们是压缩映射. 然后, 我们通过不动点定理, 证明了不断应用这个压缩映射一定会导出一个柯西点列, 并就此证明了其收敛性质.
论证的大致思路如下:
We are going to prove this using the Banach fixed point theorem by showing that the Bellman optimality operator is a contraction over a complete metric space of real numbers with metric L-infinity norm. For this, we will first discuss the fixed point problem and complete metric spaces with respect to the Cauchy sequence.
具体的细节证明在 2024-10-16中给出. 参考资料为
Mathematical Analysis of Reinforcement Learning — Bellman Optimality Equation | by Vaibhav Kumar | Towards Data Science
此处, 对于两种动态规划算法, 在理论证明方面几乎花费了一整天的功夫;
但是倘若不考虑理论证明, 只是从思想上和直观感受上进行理解, 并从code上进行具体实现, 那么本节的内容还是十分自然的
基于模型的强化学习
- 前面我们的所有分析, 都是基于MDP属于白盒环境的前提下进行讨论的
- 在MDP未知的时候, 理论上可以通过episode进行模拟, 将MDP环境建模出来, 然后进行学习.
简单来说, 就是采用"用样本均值代替期望"的方法,
总结
What’s more
以上的全部讨论都是基于MDP给定的前提. 而在下面, 我们会考虑MDP未知的情况, 讨论不对MDP建模, 直接依靠episode进行学习的方法, 如
- MC 蒙特卡洛方法
- 时序差分
几种方法的思想与树搜索中的BFS, DFS隐隐之间竟有呼应, 十分有趣.
