基于上海交通大学强化学习课程系列课程学习RL的笔记.
SJTU RL Course (wnzhang.net)
- 在第三讲中, 我们讲述了采样方法下, 对值函数进行估计的办法; 估计完毕值函数之后, 会作策略提升;
- 这一讲中, 我们讲直接作价值提升的算法.
- 可以理解为贪婪的值函数更新方法, 直接在每一步都对策略进行更新.
- SARSA, Q-learing, 多步自助方法.
各种方法的三重维度:
- 取期望 vs 大数定理采样 (BFS vs DFS)
- 多步迭代拟合后提升 vs 一步后直接max作提升 (策略迭代 vs 价值迭代)
- 对T步数据进行学习(无偏) vs 对一步数据进行学习(有偏) (MC vs TD)
考虑价值函数拟合完毕后, 做策略提升的方式:
选出最优动作, 进行相关更新(greedy, -greedy, 或考虑softmax)
此处引入了两个随机变量 , 要求解它们都是环境相关的;
而对于Q价值函数, 我们考虑最优动作:
此时得到的值是价值无关的. 因此, 站在某个状态要对动作进行评估时, 采用Q函数指导可以在不涉及环境的情况下之间得到动作打分.
所以, 在进行策略迭代算法的时候, 我们考虑的都是Q函数.
SARSA
类似TD, 对于每个五元组样本
做策略评估:
- 每一步更新函数之后, 都直接根据函数的指导进行下一个动作的选取
- 相当于每读入一个五元组样本, 都对值函数以及策略做了一次更新.
- 而之前的TD与MC, 都是至少读入了一定的episode之后, 再对策略进行更新.
on-policy TD control
- 在线策略时序差分控制(on-policy TD control)使用当前策略进行动作采样。
- 即,SARSA算法中的两个“A”都是由当前策略选择的
- 因此, 可以应用在某些不终止的环境当中; 不需要片段终结就能进行学习, 并且完成策略的更新
Q-学习
离线(off-policy)的学习方法.
什么是离线策略学习
- 目标策略𝜋(𝑎|𝑠)进行值函数评估(𝑉 (𝑠)或𝑄 (𝑠,𝑎))
- 行为策略𝜇(𝑎|𝑠)收集数据: ~𝜇
为什么使用离线策略学习
- 平衡探索(exploration)和利用(exploitation)
- 通过观察人类或其他智能体学习策略
- 重用旧策略所产生的经验
- 遵循探索策略时学习最优策略
- 遵循一个策略时学习多个策略
做法:
- 采集样本时, 始终使用行为策略(如, greedy)
- 进行训练时, 先将采集到的样本补全, 然后训练目标策略(如, greedy)
- 训练和拟合的值函数是同一个, 它们导出了两种策略
给定 , 作
此时, 虽然我们用一个策略的样本去训练另一个策略, 但是无需进行重要性采样
- 此时, 给定的是 , 训练时的是通过目标策略产生的, 所以训练样本服从策略的分布
- 实际执行的动作通过行为策略产生, 此时实际动作不符合目标策略的分布, 但是没有用于训练所以没关系.
收敛性证明:
- 期望意义上的收敛用收缩算子证明
- 实际操作过程中的收敛性用随机逼近(stochastic approximation)方法进行证明. 用到了引理5.1"满足特定性质的随机逼近过程收敛". Tsitsiklis J N. Asynchronous stochastic approximation and Q-learning。
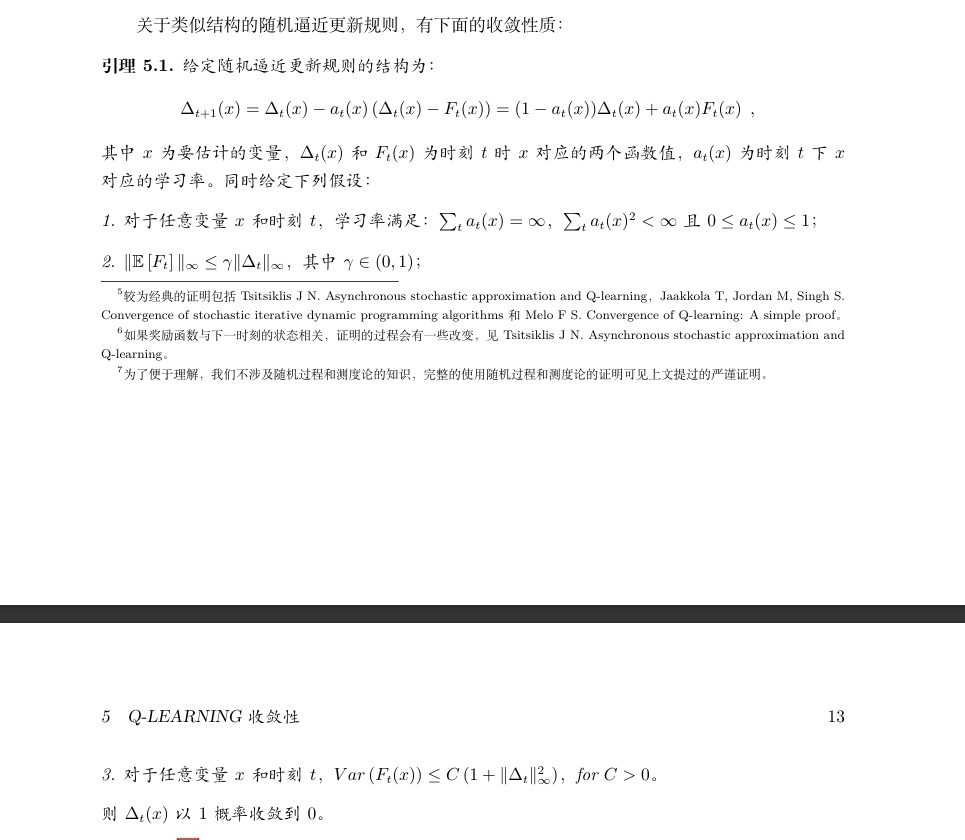
两种证明有些类似. 我们都是给出RL中的操作, 如期望迭代或随机逼近过程, 再证明其满足某些性质, 如作为一个收缩算子或作为特定类型的随机逼近过程, 最后证明这样的性质可以导出收敛性, 如根据不动点定理和引理5.1
详细的证明见
rl-proofs.pdf (wnzhang.net)
TODO: 了解随机过程的证明方法和思路. 涉及到没听过的领域, 可能没有办法详细领悟透彻, 只能理解大致思路
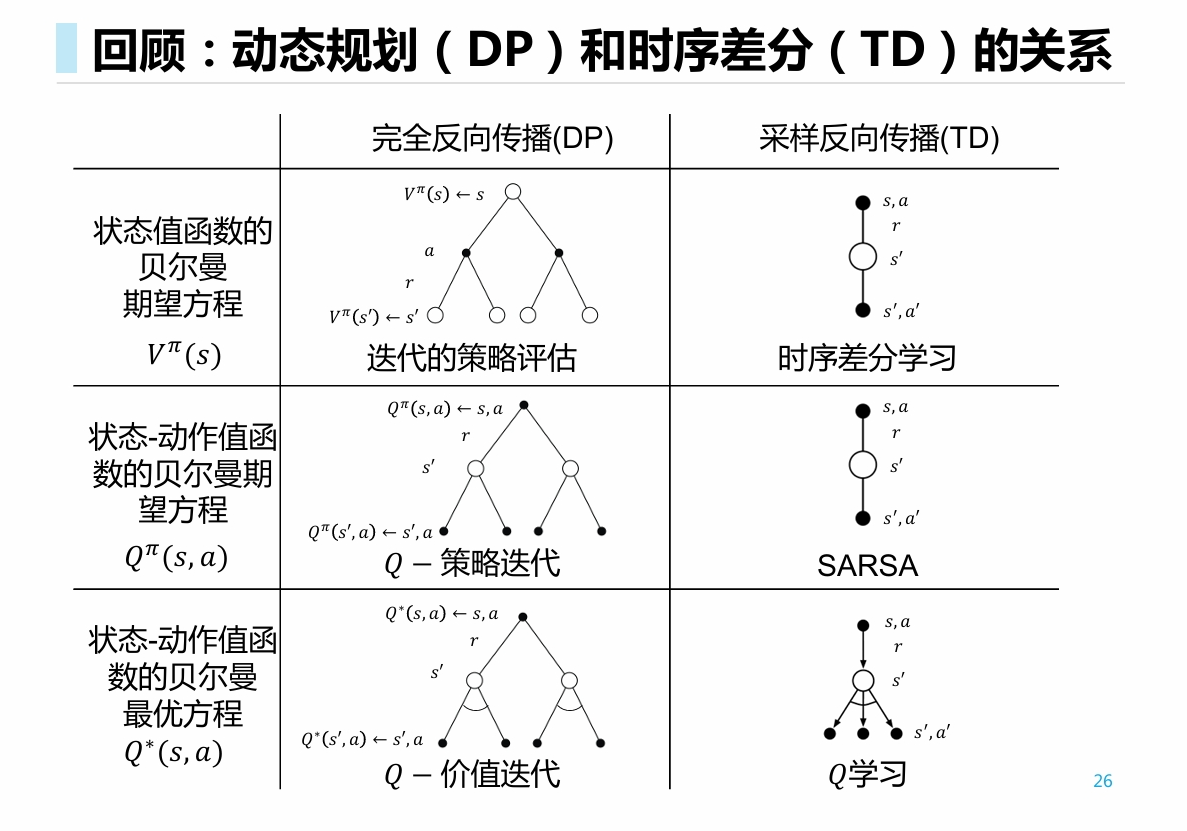
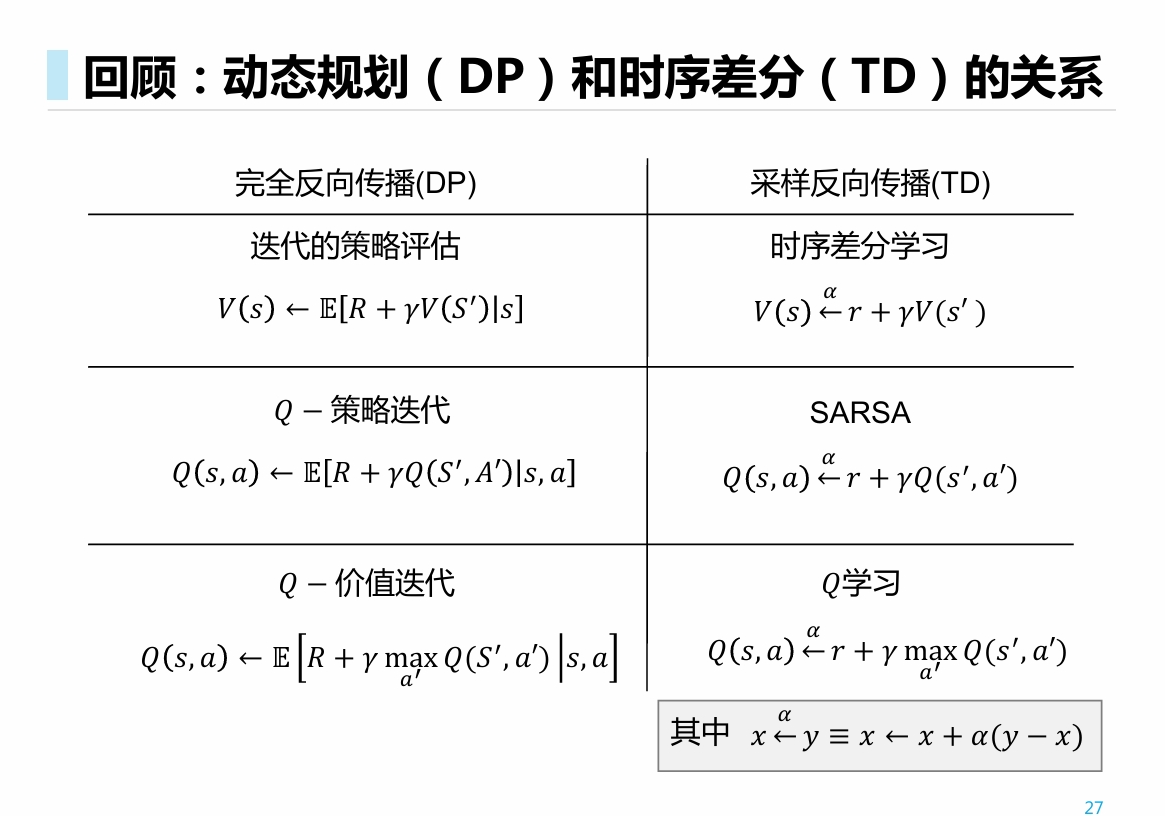
比较: 通过迭代公式进行比较. 有三个维度可以考虑这些公式:
- 期望公式(白盒, DP实现) vs 迭代公式(黑盒, 实际算法, 如MC, TD, SARSA, Q)
- 转移等式(策略迭代中值函数估计, MC, TD) vs 最优等式 (价值迭代, SARSA, Q)
- 依据V函数 vs 依据Q函数
多步自助法
- 多步时序差分预测
- 多步Sarsa
- 使用重要性采样的多步离线学习法
- 多步备份树算法
多步时序差分
考虑到, MC相当于是步的时序差分, 我们可以提出n步时序差分的概念:
对样本 ,
做更新
相当于: 一部分信息从n对三元组中得到, 一部分信息从已有的先验分布得到
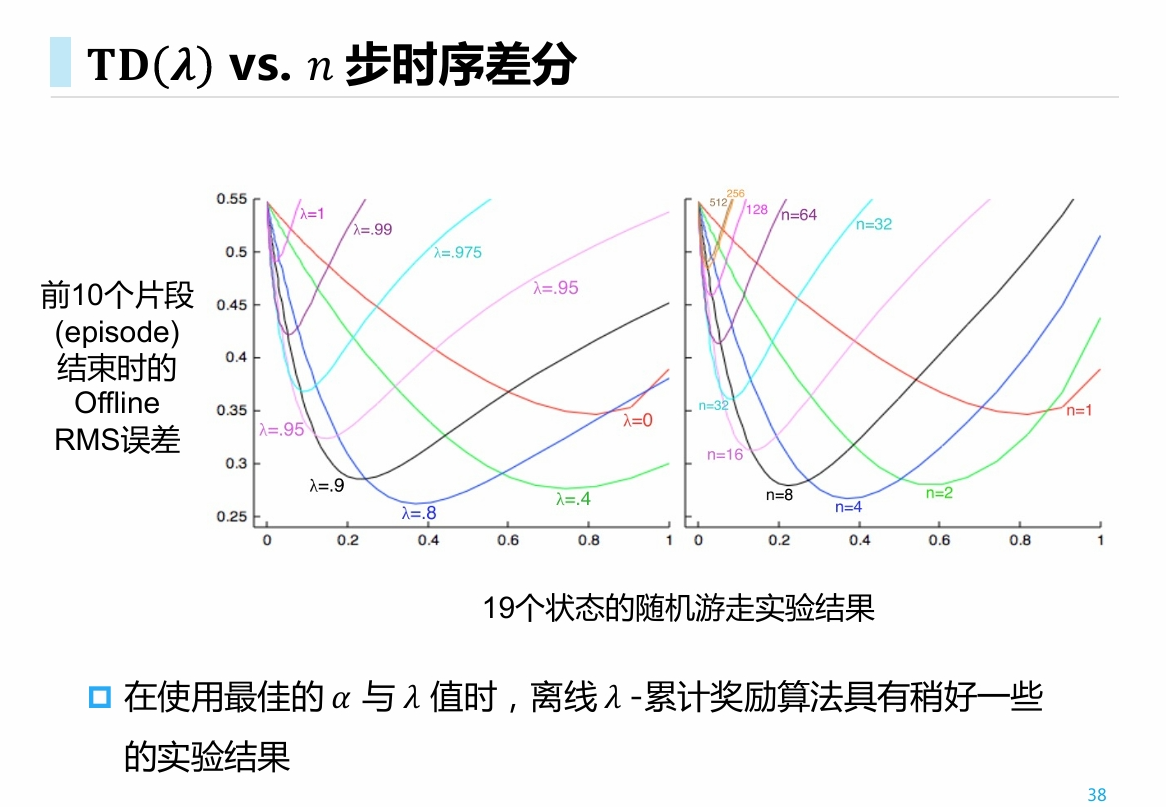
使用平均𝑛步累计奖励的𝐓𝐃 𝝀 算法
将所有 步方法结合在一起:
- 时, 相当于MC方法
- 时, 相当于单步TD方法
- 类似不断地套娃综合, 将多种方法结合在一起.
- 某种程度上可以看做是权重形式更加复杂的广义MC方法.
多步SARSA
- 前面多步的思想都是在MC和TD等值函数评估方法上考虑
- 通过将n步的思想应用在价值迭代上, 得到多步SARSA以及多步Q
考虑某条仅有一个状态的奖励非0的episode
- 对于原始的SARSA, 仅更新了与之相关的一个状态的动作取值
- 对于n步SARSA, 更新了n个状态取值
假设考虑一个长度为T的episode, 各个算法的具体的执行过程如下
- 原始MC: 对于长度T的样本, 更新1次
- 单步TD / SARSA: 对于长度1的样本, 更新T次
- n步TD / SARSA: 对于长度为n的样本, 更新T-n次
可见, 某种程度上, n的取值应当不大不小, 此时更新量的总和最大, 同时最好地平衡了偏差和方差
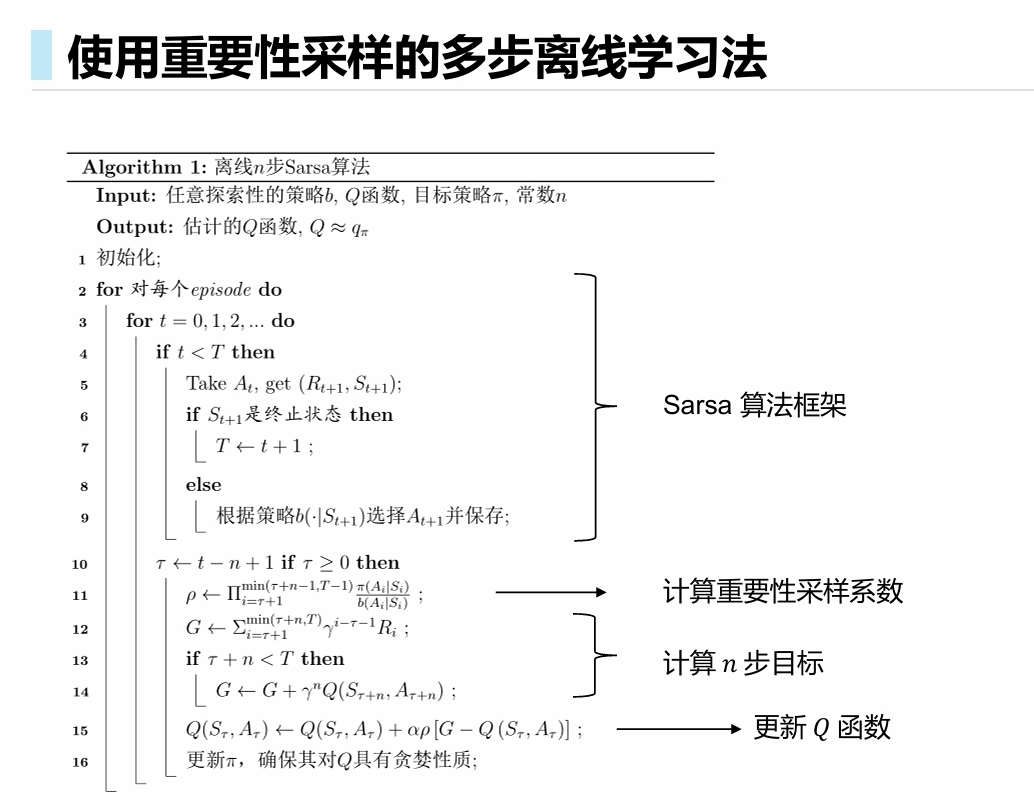
使用重要性采样的多步离线学习法
推导过程类似. 对于n步的离线更新算法, 会添加一个n项分式连乘的重要性修正值, 从而将执行策略分布修正为目标策略分布.
多步树回溯算法(N-step Tree Backup Algorithm)
不需要重要性采样的算法
- 𝑄学习和期望Sarsa(expected Sarsa)
- 既出让了一部分偏差, 又出让了一部分方差
- 统计了n个已知的r, 出让了方差来减小偏差
- 使用了先验的, 出让了偏差来减小方差
对于单步情况
对比单步动态规划:
单步TD(公式上与SARSA相同, 不过策略在episode结束后才进行提升):
某种程度上, 这个算法综合了期望和采样:
- 对于策略相关的概率分布, 显式求取期望. (此时通过求期望得到了a’, 并选择信任已有的先验信息)
- 对于环境相关的概率分布, 如转移函数等, 通过不断采样来隐式逼近 (考虑的每个样本对都是已经采到的 )
总结