基于上海交通大学强化学习课程系列课程学习RL的笔记.
SJTU RL Course (wnzhang.net)
前面我们讨论了许多黑盒的方法, 在那些方法中我们并不考虑环境, 而是直接从数据片段进行学习. 而现在, 我们将尝试获取一个模拟环境, 并通过模拟数据来学习.
课程回顾:
基于模型的动态规划
- 值迭代:
- 策略迭代:
无模型的RL:
- 在线策略蒙特卡洛
- 在线策略时序差分
- 在线策略时序差分 SARSA (直接指导策略)
- 离线策略时序差分 Q学习 (允许离线, 同时学习)
策略提升定理:
价值评估指导策略提升
如何更精确地评估价值?
规划与学习
模型: 可以分为分布模型及样本模型(白箱状态, 可写出分布的模型及黑箱状态, 只能进行采样的模型.)
规划: 状态空间的规划 / 规划空间的规划(将规划本身作为空间考虑. 此处规划可以是一个动作结合和动作顺序的约束)
本节课主要围绕状态空间的规划.
通用框架:
- (将真实数据拿来构建模型)
- 通过模型采样得到模拟数据
- 通过模拟数据更新值函数, 从而改进策略
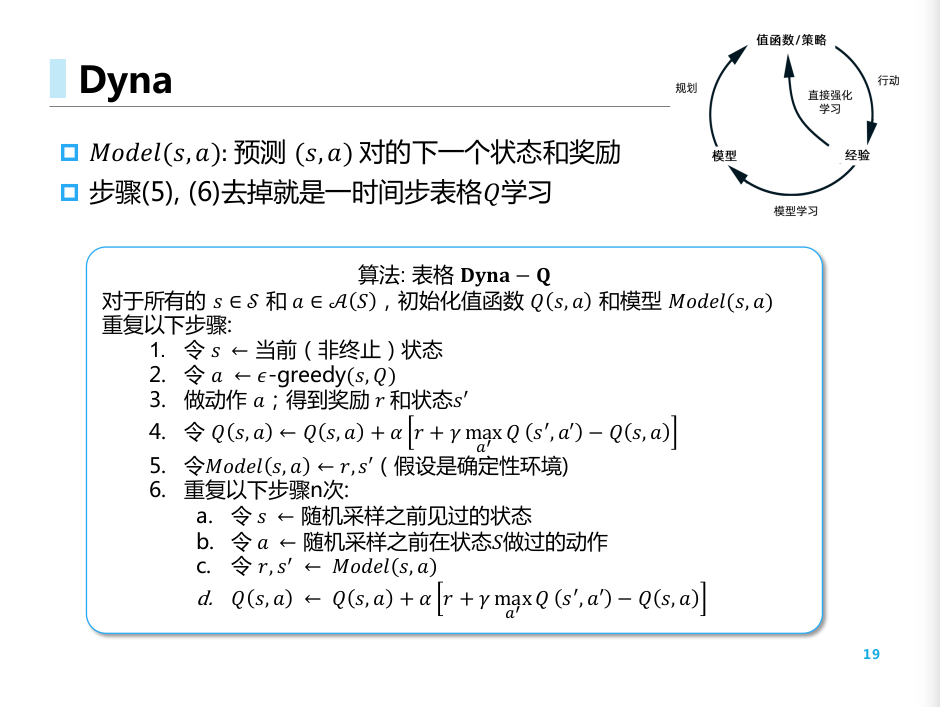
Dyna. 引入了模拟经验的Q学习:
对比普通的方式, 能够更快收敛, 同时更好应对变化的环境.
Dyna-Q+
在原始的奖励值中加上了一个鼓励探索的正则项.
采样方法
- 均匀采样: 将很多不重要的状态进行了反复访问.
- 后向聚焦 backward focusing: 很多状态的值变化会带动前续状态的值发生变化.
- 优先级采样: 给状态设定优先级, 根据优先级采样.
期望更新与采样更新:
- 期望更新需要分布模型, 计算量大, 没有偏差
- 采样更新只需要采样模型, 计算量需求低, 有采样误差(smapling error)
- 轨迹采样: 计算量少, 不需要分布, 简单有效; 缺点: 不断重复已经访问过的状态 (类似MC)
决策时规划
实时DP(RTDP)
相比传统DP: 跳过了大量策略无关的状态. 只更新轨迹访问的状态值
https://github.com/thunderInfy/Racetrack
期望意义下的单步TD.
决策时规划 vs 背景规划:
Background Planning 更新很多状态值, 供之后的选择使用.
Decision-time Planning 着眼于当下, 在不需要快速反应的游戏中很有用.
启发式算法
- 在当前的状态, 对后续可能的情况进行展开.
- 回溯到当前节点, 更新当前的值函数.
- 贪婪策略在单步情况下的扩展.
- 搜索量越大, 越接近最优 (贪婪的扩展, 完全DP的妥协)
Rollout算法
- 从当前状态进行MC.
- 选取估计值最高的动作.
- 不断重复
- 类似未给定分布时的 启发式算法.
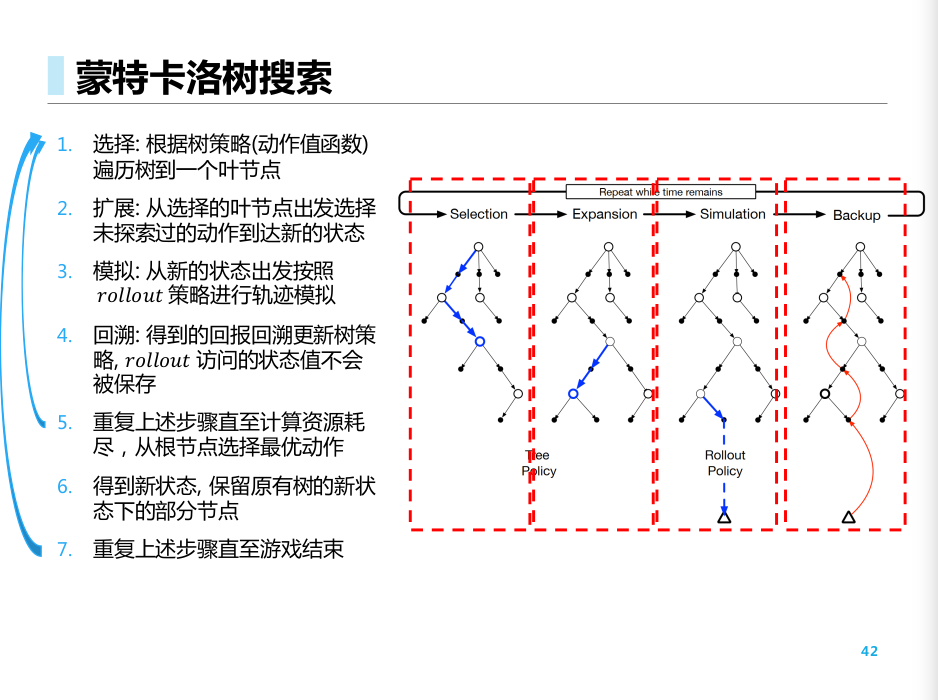
MCTS
- 选择叶子节点
- 扩展节点
- Rollout模拟所在节点, 回溯更新很多节点的值函数. rollout 节点不保存
- 不断重复, 直到资源耗尽
- 得到新状态, 保存原来树新状态下的节点.