学习控制理论课程PPT的记录. 相关笔记会另开博客记录. 也可能不会开.
分析性能时, 我们主要分析二阶系统的时域响应性能. 性能指标为:
- 上升时间 tr
- 峰值时间 tp
- 调节时间 ts
- 超调量 P.O.
- 震荡次数 Oscillation Number
控制系统的性能
回顾: 控制系统的数学解析:
Y(s)=G(s)R(s),y(t)=L−1(Y(s))
数学式很强大, 但是还不够. 我们需要分析系统是否足够"快 , 准, 稳", 即
- 分析控制系统的性能 CH5
- 分析控制系统的稳定性 CH6
时域响应概述
考虑一个闭环控制系统, 我们的目标是
y(t)=r(t)
但是, 随着r的变化, y与r的误差往往不能保持为0, 而是会不断抖动.
此时, 我们分析系统的时域响应:
- 系统在输入信号的作用下, 输出随时间变化的过程
- 直观反映系统性能
- y(t)=L−1(Y(s))
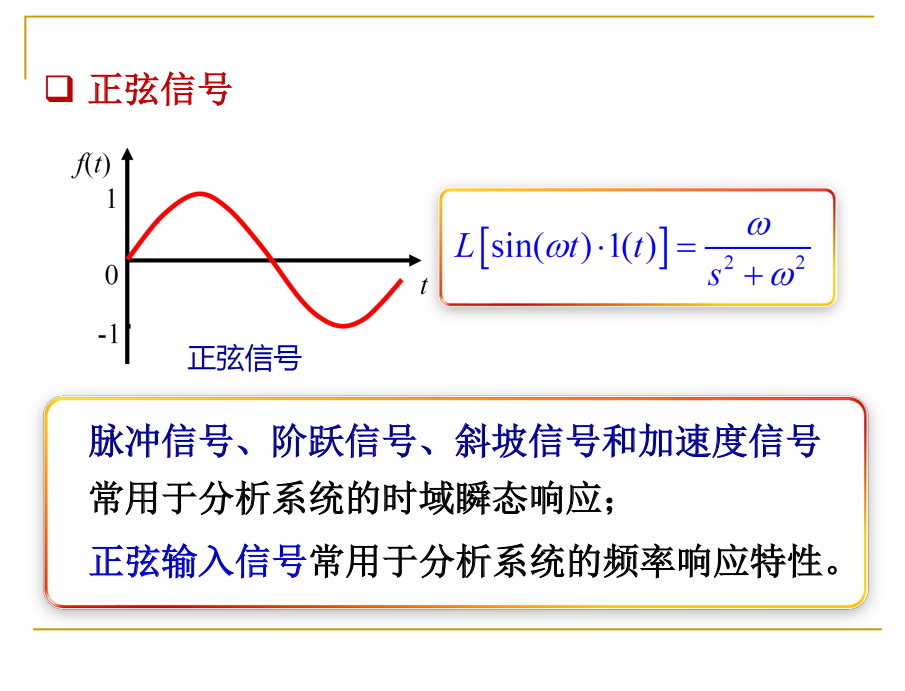
常见的输入信号:
- 脉冲信号 1
- 阶跃信号 1/s
- 斜坡信号 1/s2
- 加速度信号 1/s3
- 正弦输入信号 w/(s2+w2)
常见系统:
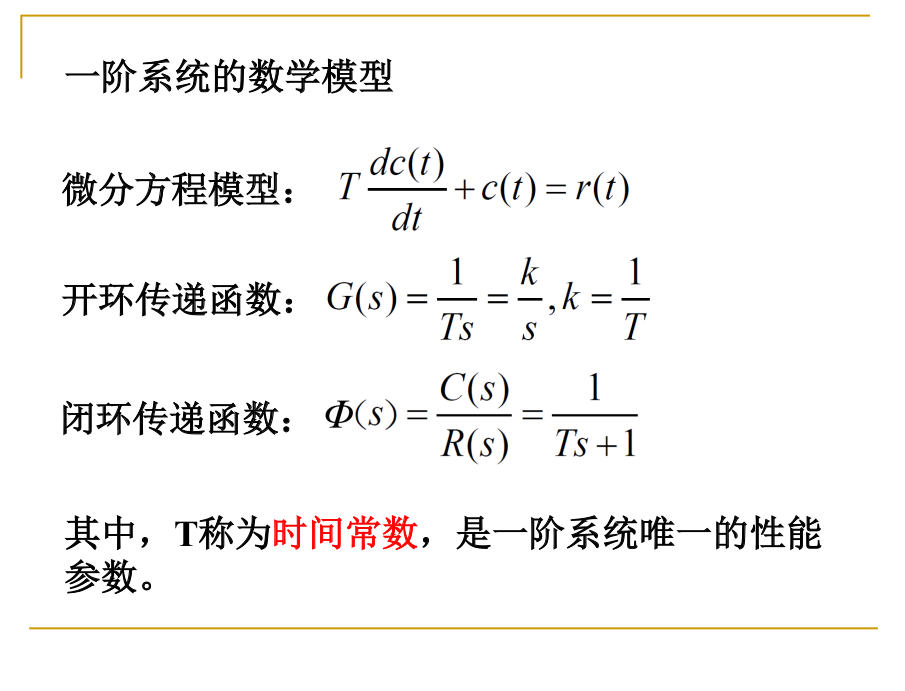
- 一阶系统 G(s)=1/(Ts+1)
- 二阶系统 G(s)=(wn2)/(s2+2ηwns+wn2)
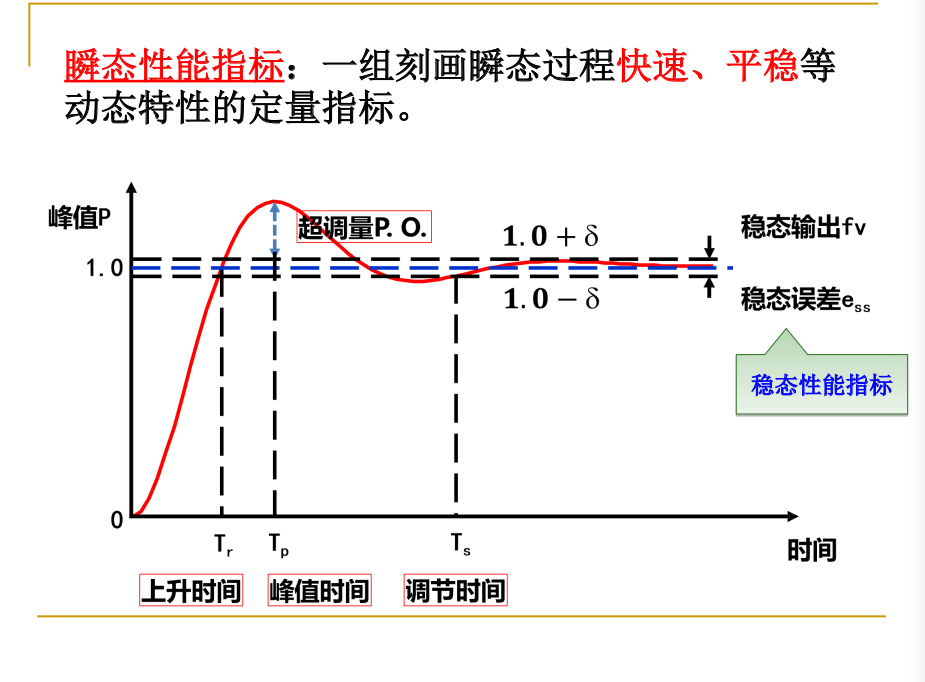
瞬态响应和瞬态性能指标
时域分析中, 可分为瞬态过程和稳态过程来研究.
- 瞬态响应: 在输入状态下, 从初始态到稳定态的过程. 反映稳定性和快速性
- 稳态响应: t趋于无穷时, 系统输出的表现. 反映准确性.
性能指标:
上升时间 Ries Time:
从零开始, 首次到达稳态值的时间 (有超调的系统 / 欠阻尼); 或从稳态值10%到90%的过程 (无超调的系统 / 过阻尼)
峰值时间 Peak Time:
从零开始, 到达首个峰值的时间
反映了系统的敏捷性
调节时间 Settling Time:
到达, 并始终保持在允许误差范围内的最短时间
标志过渡过程的结束, 衡量了系统响应的快速性
超调量 Percent Overshoot P.O. :
响应曲线最大峰值与稳态值1的差, 用百分比表示.
反映了系统的平稳性
震荡次数 Oscillation Number:
在调节时间内, 曲线振荡的次数 (看极值的数量?)
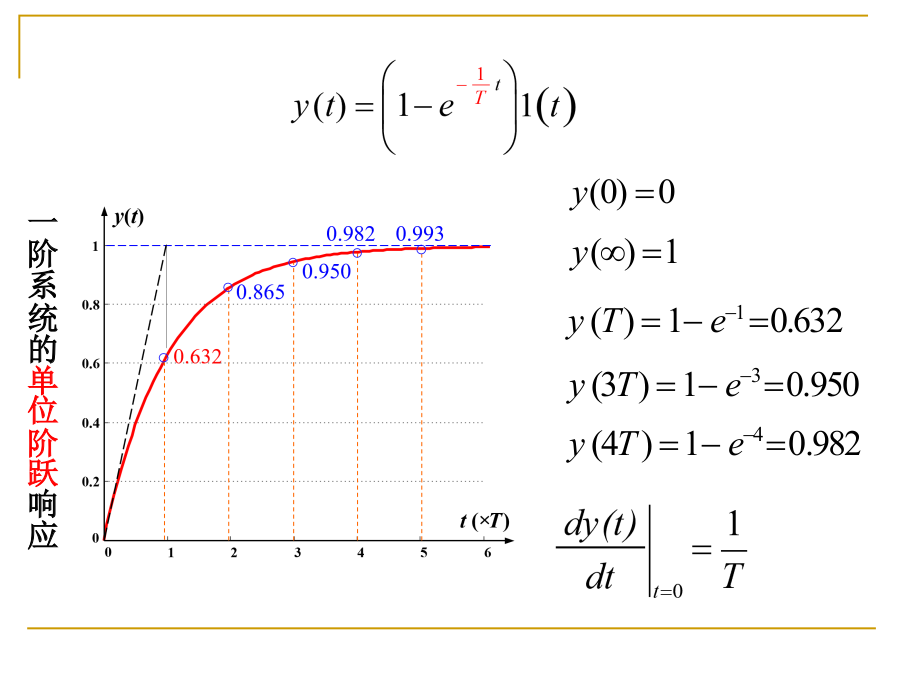
一阶系统时域响应性能分析
典型例子是RC低通滤波器 (这是个啥啊?)
- 中间只有一个一阶导元件作为一阶元件. 其参数称为时间参数, 为一阶系统唯一的性能参数
- 闭环时, 表现为一阶系统.
对于各种输入的响应曲线:
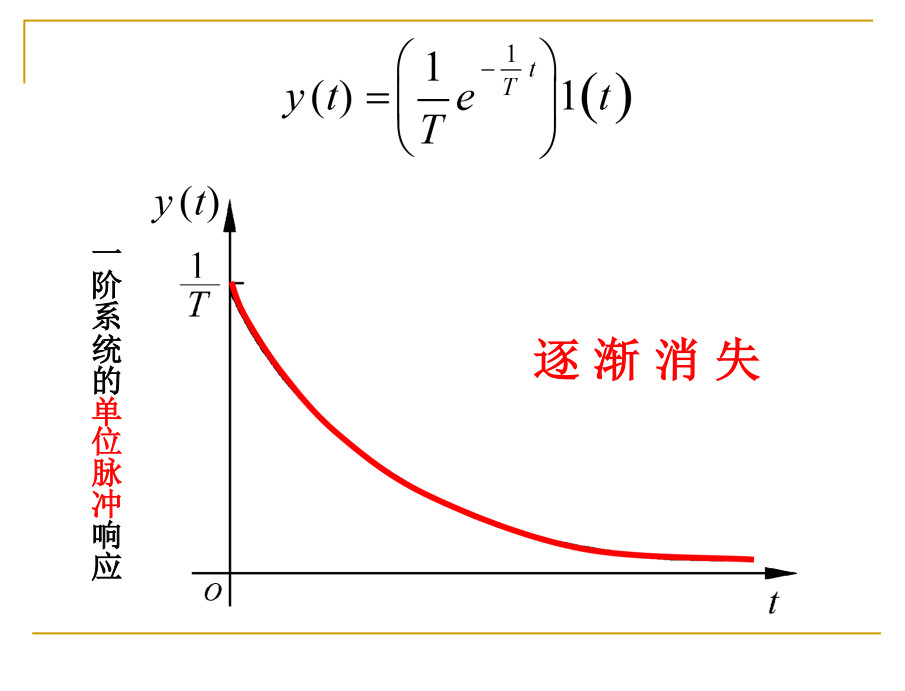
脉冲响应:
阶跃响应:
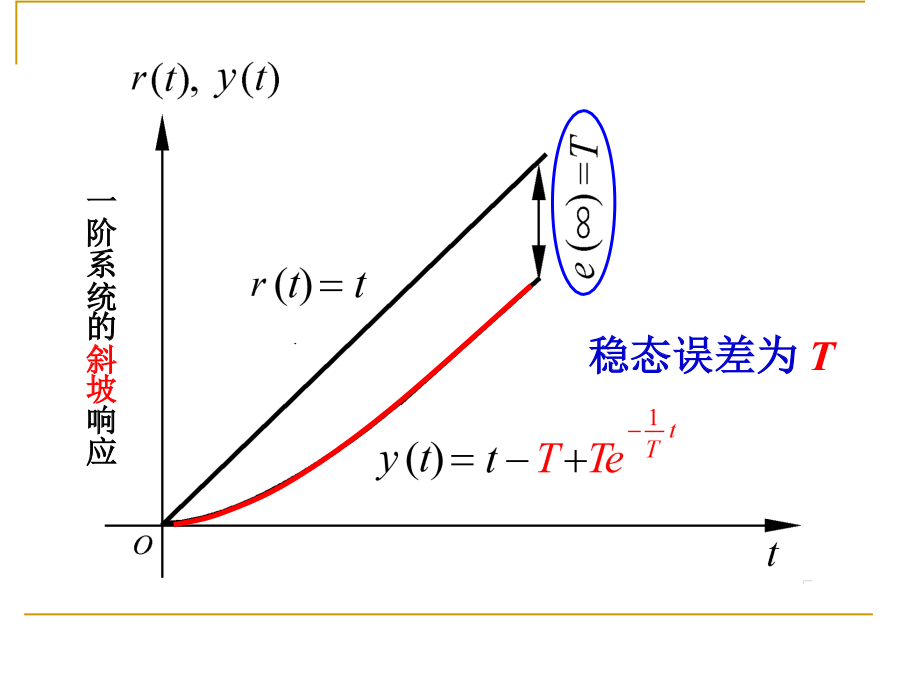
斜坡响应:
加速度响应: 任务复杂的时候, 有更恶劣的性能(无限偏差)
y(t)=21t2−Tt+T2(1−e−t/T)=21t2−T(t−T(1−e−t/T))
- 选择元器件, 减小时间常数
- 引入反馈, 减小时间常数 (闭环传递函数再反馈一次. 反馈有功率损失的副作用)

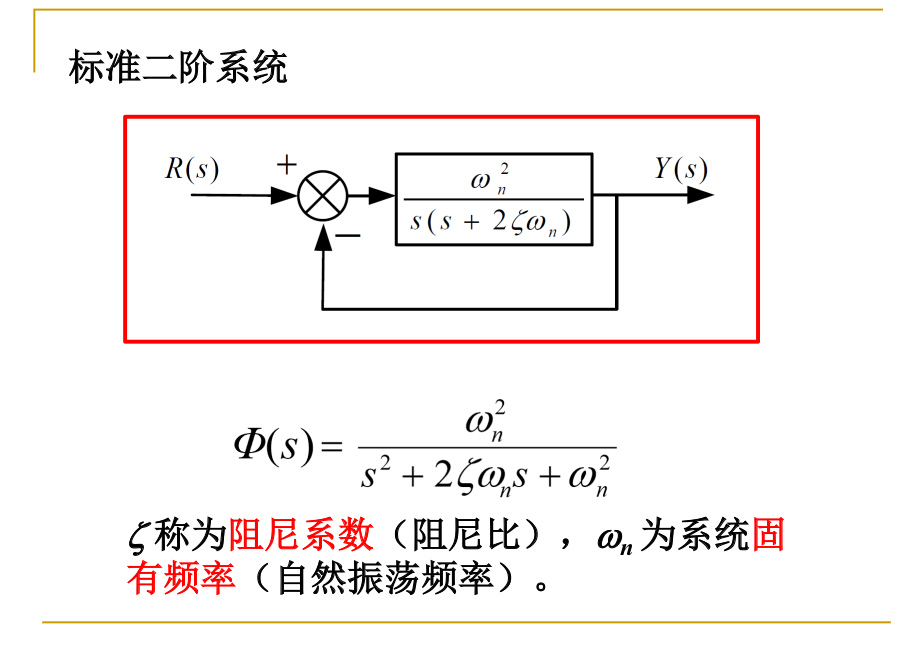
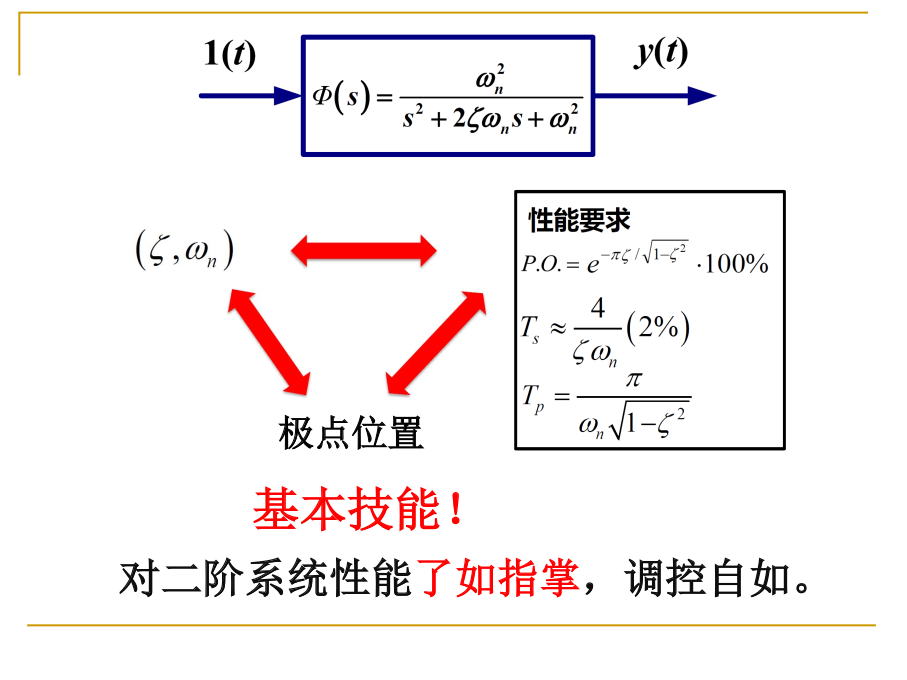
二阶系统时域响应性能分析
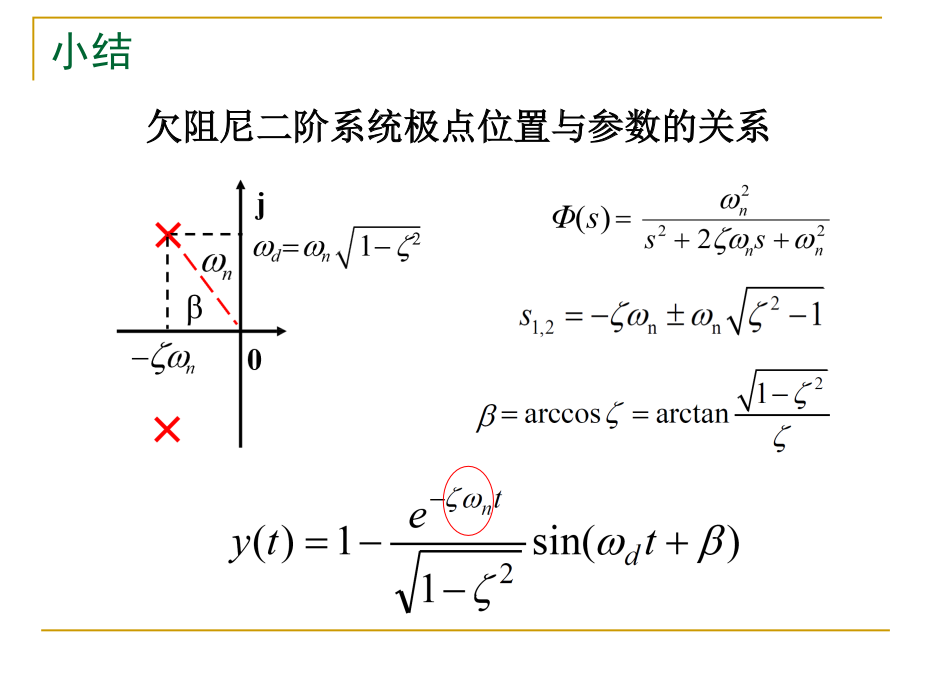
二阶系统 G(s)=(wn2)/(s2+2ηwns+wn2)
开环传递函数为 (wn2)/s(s+2ηwn)
上面为标准形式. 一般形式可加一个放大器.
其中两个参数分别称为 阻尼系数和系统固有频率(类似震荡频率)
我们考虑阻尼系数.
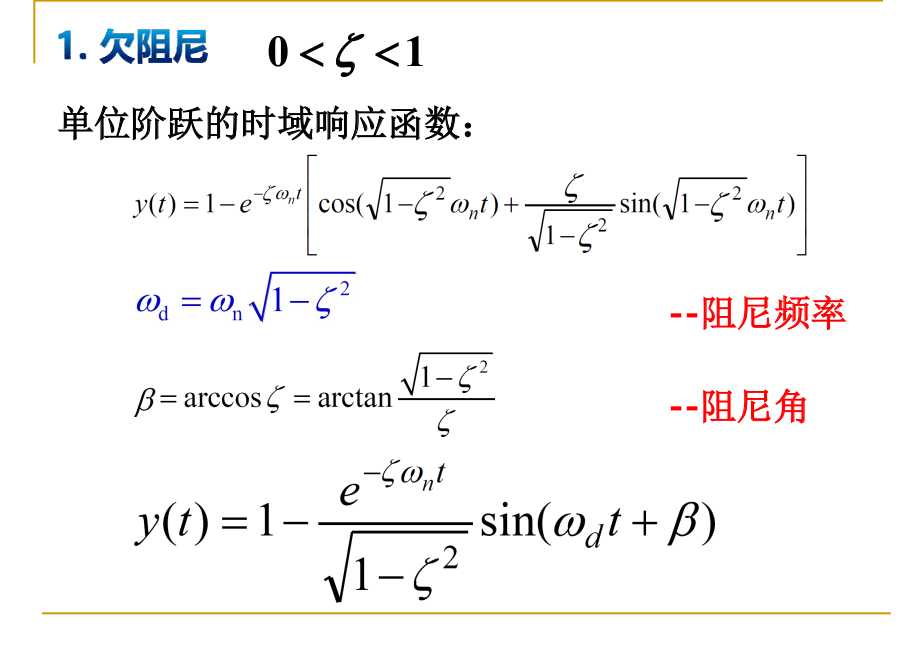
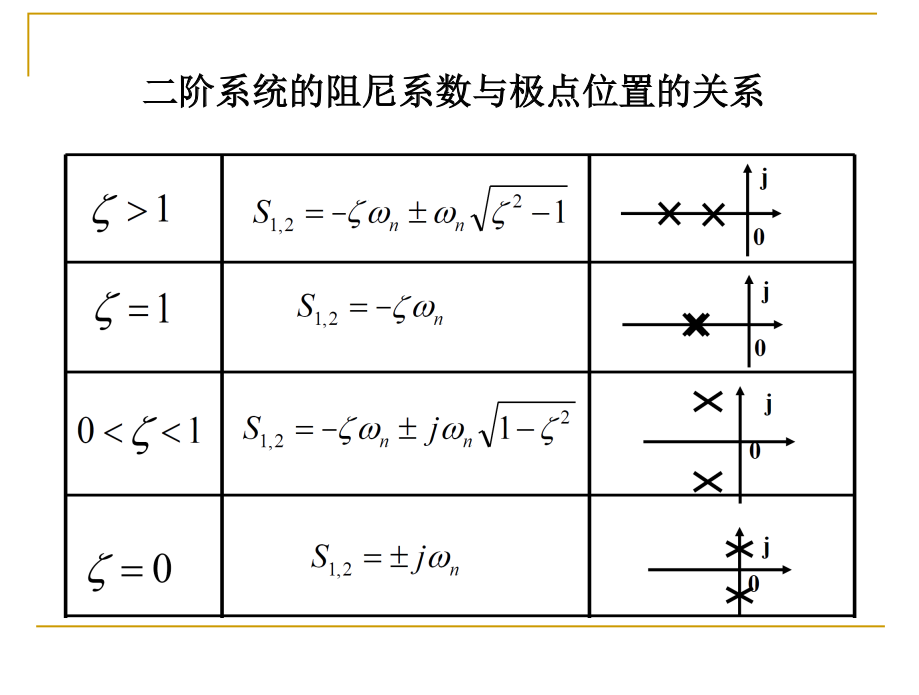
当阻尼系数处于 (0,1), 式子是最复杂的.
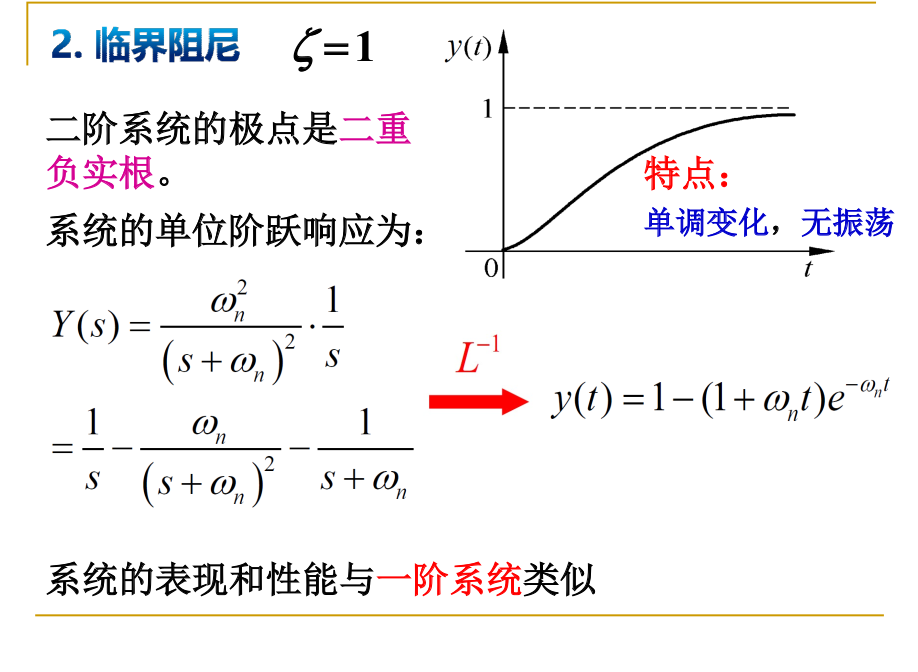
当阻尼系数为1时, 恰到好处. 既不会超调, 上升的也较快.
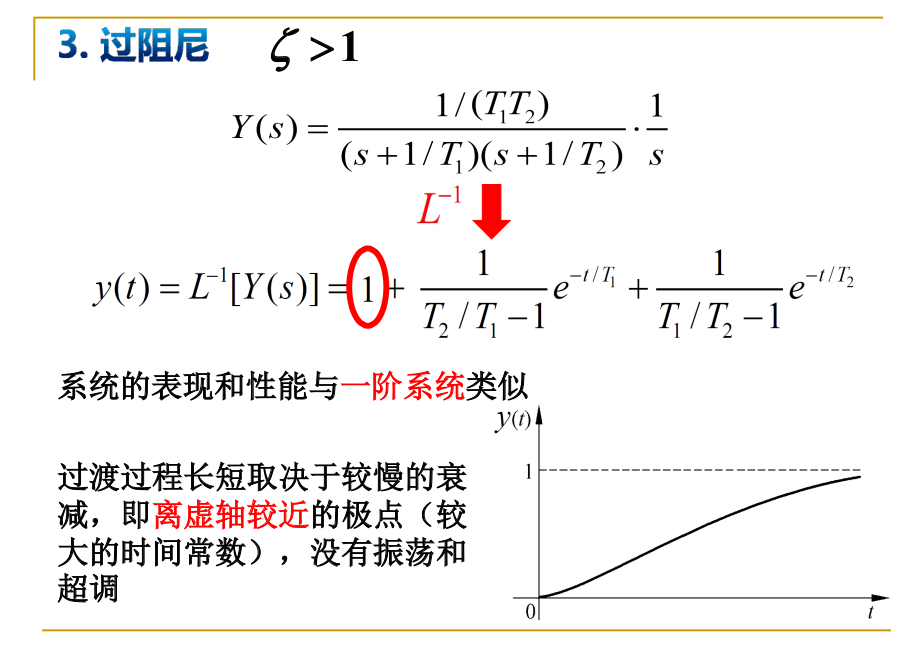
当阻尼系数大于1时, 同样不会超调, 但是上升更慢
性能与一阶系统类似. 采用和一阶系统类似的T参数
过渡过程取决于较慢的衰减过程, 即离虚轴较近的极点 ( 较大的时间常数)
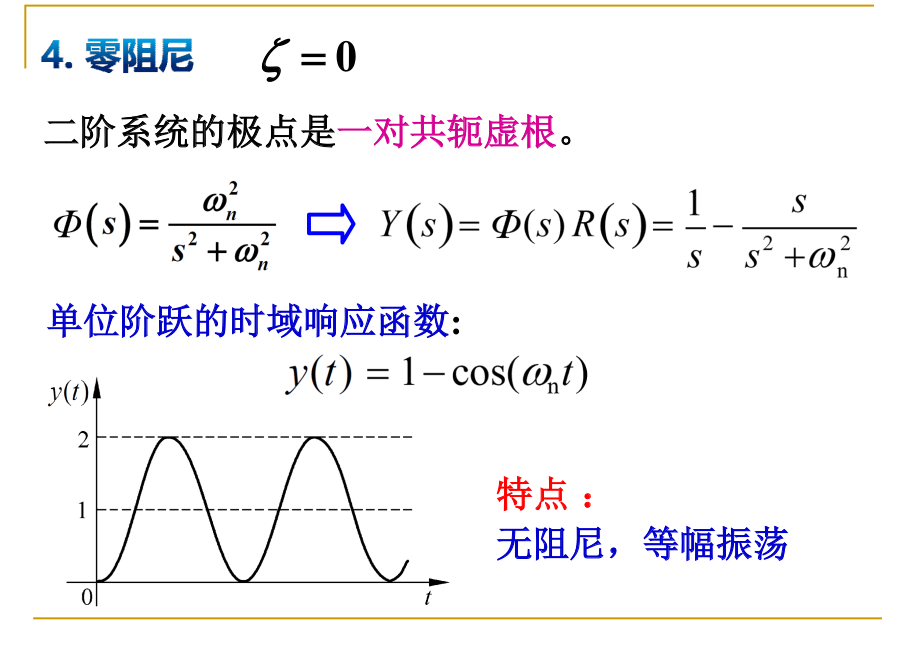
过渡时间的长短取决于较靠近虚轴的极点. 所以临界阻尼的收敛速度是最快的(较近的极点离得最远); 而0阻尼则不收敛(极点在虚轴上)
过阻尼和临界阻尼的性质都类似一阶系统.
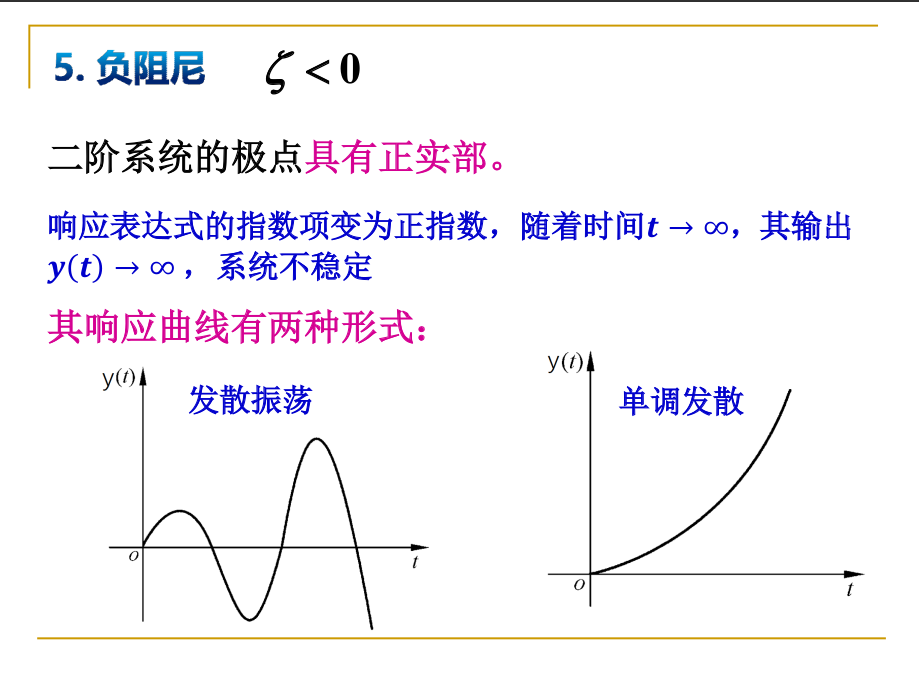
当阻尼系数为0时, 持续震荡.
当阻尼系数小于0时, 发散
欠阻尼系统性能指标计算
对于阶跃函数:
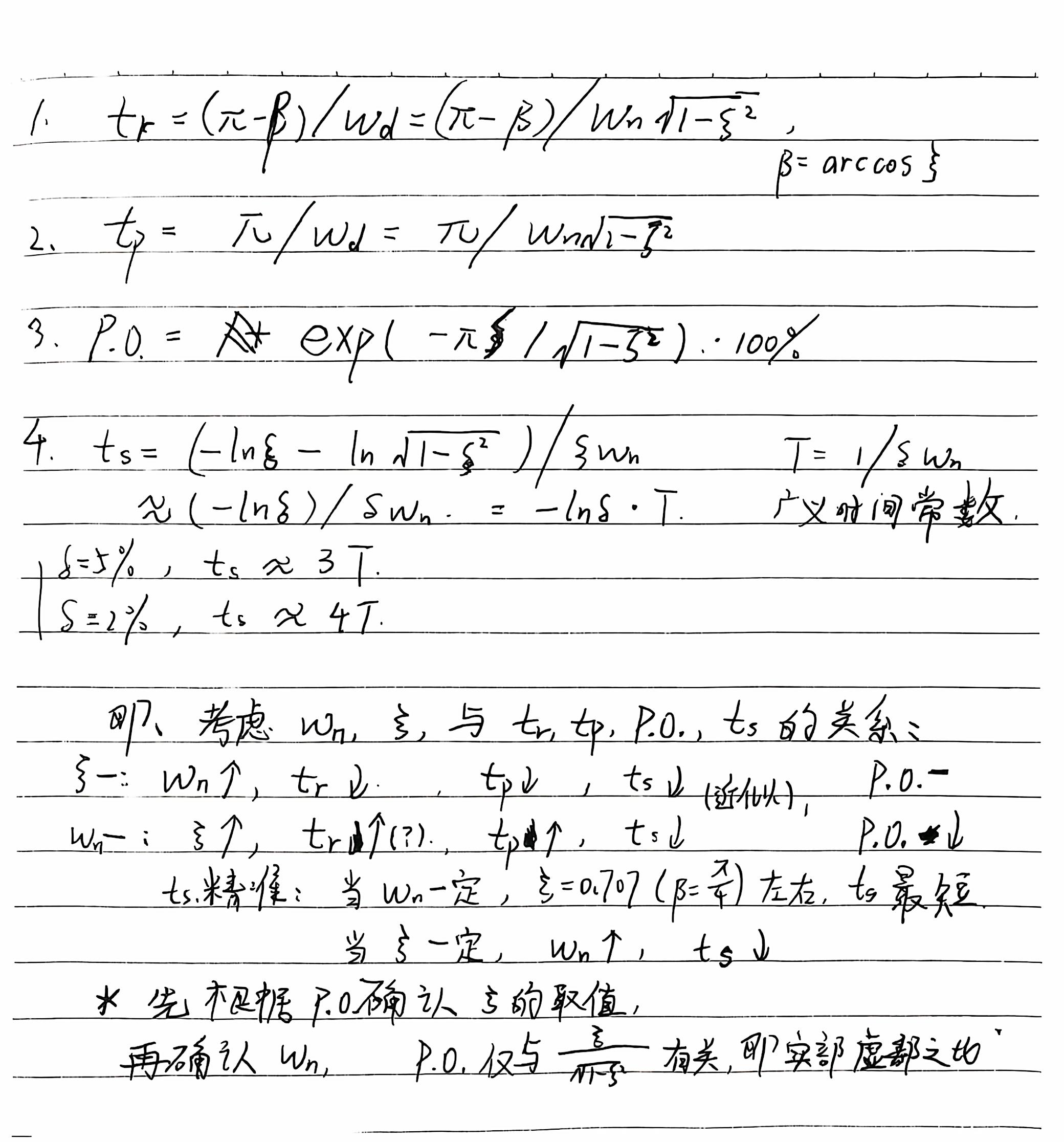
β=arccosη=arctanη1−η2
稳态误差为零.
上升时间为
tr=wdπ−β=wn1−η2π−β
峰值时间为
tp=wdπ=1−η2π
超调量为
P.O.=exp1−η2−πη⋅100%
调节时间为
ts=ηwn−lnδ−ln1−η2≈(−lnδ)T
极点与系统的各种指标的关系:
等阻尼η线(β,P.O.线)
此线上, 极点的实虚部比值相等, β,P.O.的值不变.
等wn线
此线上, 极点wn(−η+−j1−η2)的模长相等, wn的值不变.
等ts线
对于单位过渡时间 Ts=ηwn1, 它的值就是极点实部的值. 因此过渡时间只与实部有关
等tp线
对于峰值时间 Tp=wn1−η2π, 它的分母就是极点虚部的系数. 因此峰值时间只与虚部有关
好漂亮的性质啊. 这是巧合吗?
Example:
- 已知极点, 求各种指标, 如调节时间, 超调量, 峰值时间: 先解出阻尼系数和系统自然频率
- 已知阶跃响应时域图像, 求传递函数: 先根据稳态输出得到待定系数式, 再根据各种指标, 如超调量, 确定阻尼系数和系统自然频率
- 参数设计, 即给出各种性质的要求, 确定满足要求的增益系数K和相关参数: 图像性质.
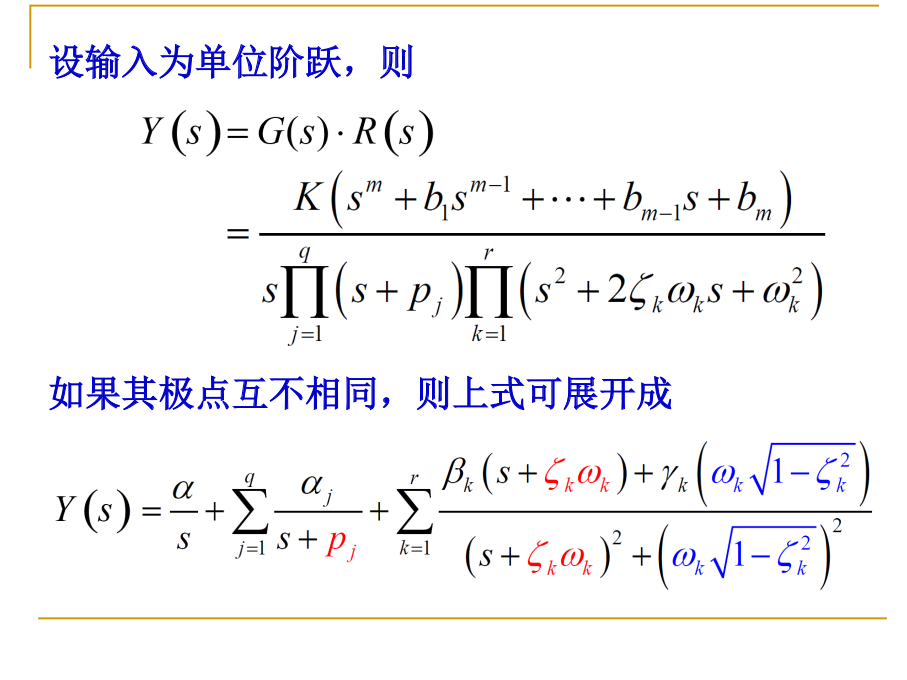
高阶系统时域响应性能分析
将高阶系统的式子化为若干一阶惯性环节和二阶振荡环节的叠加.
对于一个高阶系统, 其转移函数为
G(s)=R(s)Y(s)=Ksn+a1sn−1+...+an−1s+ansm+b1sm−1+...+bm−1s+bm
可将分母化作若干一阶式和二阶式连乘的结果 (实根和复根)
H(n)(s)=q∏j=1(s+pj)r∏k=1(s2+ηkwks+wk)
其中 m≤n,q+2r=m
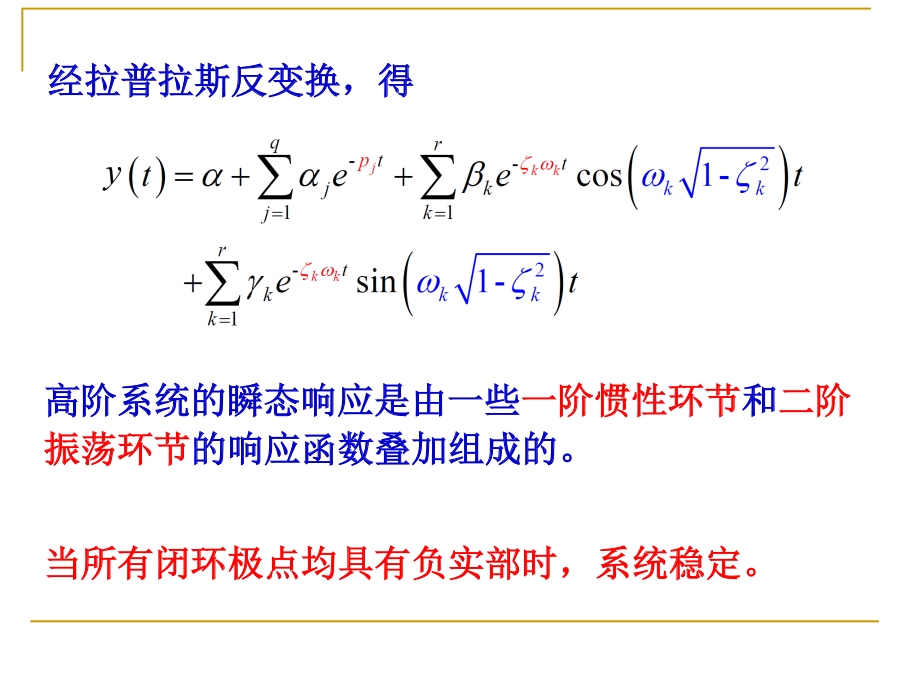
- 高阶系统的瞬态响应由若干一阶环节与二阶环节叠加组成
- 当所有闭环极点均具有负实部时, 系统稳定; 否则不断振荡
额外闭环零点 / 极点对性能的影响
高阶时, 情况更加复杂.
我们考虑在二阶系统上添加一个额外环节:
- 接上一个微分环节 zs+z. 此时原有输出被微分环节调理, 波动增强(类似减小阻尼系数). 零点越靠近虚轴, 效应越明显.
- 接上一个积分环节 zs+z. 此时原有输出被积分环节调理, 波动减弱(类似增大阻尼系数). 极点越靠近虚轴, 效应越明显. 所以, 当极点很远离虚轴时, 可以将其忽略. (根据分解式, 此时该极点的影响指数衰减, 且速度非常快)
高阶系统简化
- 忽略非主导极点: 当远处极点的距离超过近处极点10倍时, 可以忽略远处极点, 将近处极点作为主导极点 . (近处极点附近需要没有零点) (注意要保证系统的静态增益不变)
- 偶极子相消: 若具有负实部的零点和极点在数值上相近(互相 之间的距离小于本身距离的十分之一), 则可以将零点和极点一起消掉.
于是, 可以将一些高阶系统近似为二阶系统, 然后按照已有的方法进行分析.
系统的稳态性能分析
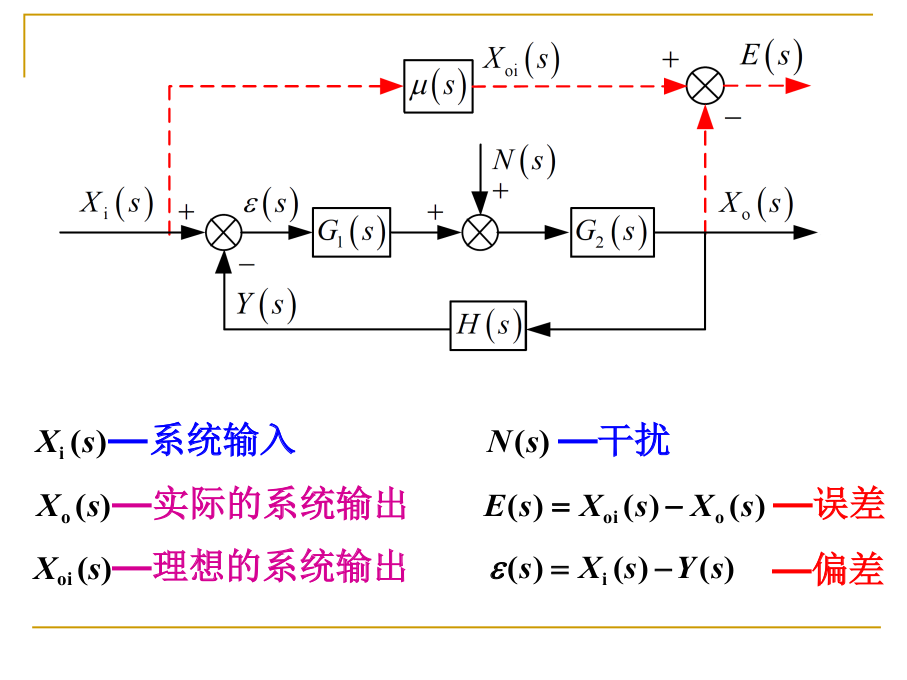
误差e(t) :系统 理想输出和实际输出的差
偏差ϵ(t) :系统输入信号和反馈信号的差
此处, 考虑了理想输入与实际输入信号的差别, 同时考虑了实际输出和反馈信号的差别.
误差是理想化的偏差, 偏差是实际仪器能测得的误差. (某种程度上)
输入到输出的传递关系(不存在干扰的情况):
Xi(s)Xo(s)=1+G1(s)G2(s)H(s)G1(s)G2(s)
当 G1(s)G2(s)H(s)>>1时, 将1忽略, 有
Xi(s)Xo(s)≈H(s)1
于是, 理想化的输入输出关系为
Xoi(s)=μ(s)Xo(s)=H(s)1Xi(s)
自动控制系统的唯一目标就是(令 H(s) 为常数)
Xoi(t)=H1xi(t)
即, 除了一个系数增益, 将所有期望的变化过程都直接进行传递
公式推导: 当反馈通道不存在干扰时
当令 μ(s)=H(s)1
E(s)=H(s)ϵ(s)
- 对于实际的系统, H(s)往往是一个常数. 于是求出了稳态偏差也就求出了稳态误差
- 对于单位反馈系统, 偏差与误差相同.
输入引起的稳态误差
一. 偏差传递函数与稳态误差
当不存在干扰时, 可以直接考虑 G(s),H(s)
偏差传递函数为
Xi(s)epsilon(s)=1+G(s)H(s)1
当系统稳定时, 求稳态偏差为:
ϵss=t→∞limϵ(t)=s→0limsϵ(s)=s→0lims1+G(s)H(s)1Xi(s)
稳态误差为
ess=s→0limE(s)=s→0lim[ϵ(s)/H(s)]=ϵss/H(0)
稳态误差取决于系统的结构参数和输入信号的性质
二. 系统的型次
根据前面的分析, 我们只需要求解一个传递函数和一些极限, 就可以得到系统的稳态误差 / 稳态偏差
我们考虑系统的开环传递函数(对于反馈信号)
G(s)H(s)=sλ(T1s+1)(T2s+1)...K(a1s+1)(a2s+1)...
当求极限时, 括号中的内容都变为常数, 重要的只有外面的λ:
我们根据lambda的值, 称系统为 0型/ 1型 / 2型系统.
根据
s→0lims1+G(s)H(s)1Xi(s)
我们可以讨论不同信号, 不同型次系统的稳态偏差:
定义静态位置误差系数 (若函数连续? 或许可以通过laplace变化的性质来保证连续性):
Kp=s→0limG(s)H(s)=G(0)H(0)
则
对于单位阶跃响应, 稳态误差为
ϵss=1+Kp1
- 0型系统, Kp=K, ϵss=1+K1
- 1型及更高型次的系统: Kp=∞, ϵss=0
定义静态速度误差系数:
Kv=s→0limsG(s)H(s)
则
对于单位斜坡响应, 稳态误差为
ϵss=Kv1
- 0型系统, Kv=0, ϵss=∞
- 1型系统: Kv=K, ϵss=1/K
- 2型系统: Kv=∞, ϵss=0
定义静态加速度误差系数:
Ka=s→0lims2G(s)H(s)
则
对于单位加速度响应, 稳态误差为
ϵss=Ka1
- 0型系统, Kv=0, ϵss=∞
- 1型系统: Kv=0, ϵss=∞
- 2型系统: Kv=K, ϵss=1/K
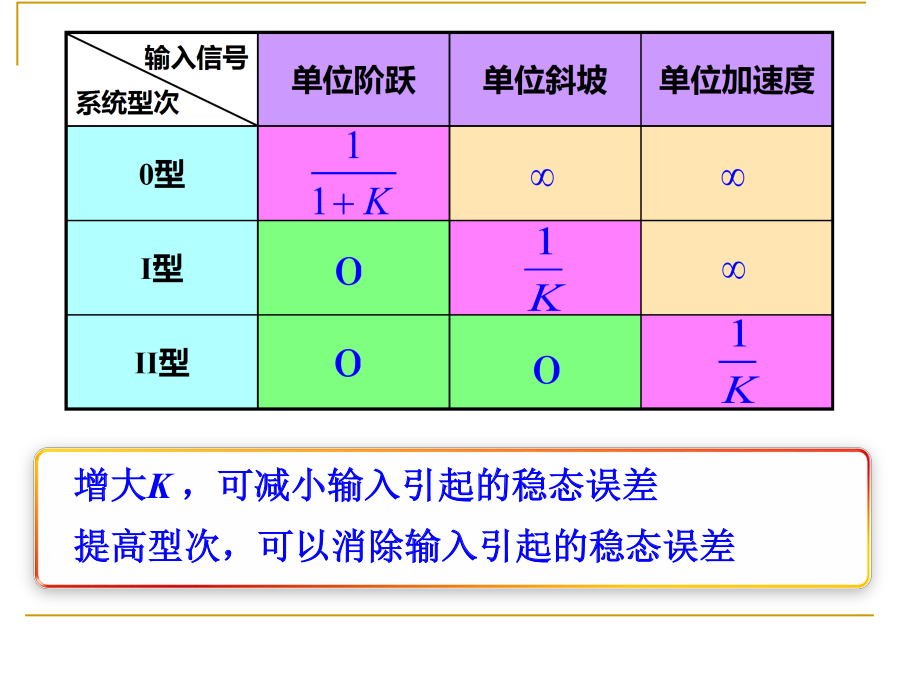
因此, 只要将系统的开环函数化为上述形式, 然后求解系统的型次及相关极限即可.
干扰引起的稳态误差
由于
ϵ(s)+ϵ(s)G1(s)G2(s)H(s)+N(s)G2(s)H(s)=Xi(s)
所以, 当我们不考虑输入时, 可以得到干扰引起的偏差的传递函数为
N(s)ϵ(s)=1+G1(s)G2(s)H(s)−G2(s)H(s)
类似求偏导. 无关变量连同其系数一起被忽略. (线性系统)
求极限, 便可以得到相应的稳态误差和稳态偏差.
也可以直接求出由干扰引起的输出, 然后根据定义直接求的干扰引起的误差 (不经过偏差的求解. )
总结:
- 系统误差包括输入引起的误差和干扰引起的误差
- 求解系统稳态误差应当首先判断系统的稳定性
- 当两个量同时作用时, 求解线性系统的偏差, 可以利用叠加原理
Example:
- 误差前增益 K1越大, 稳态误差越小.
- 即, 可以通过增大前向通道干扰点前的 放大倍数来减小干扰带来的稳态误差.
- 在干扰点前加积分器 1+sK3, 总式子为K1(1+sK3), 可以消除干扰带来的稳态误差影响
总结: 要使得干扰引起的稳态误差尽量小, 干扰输入点前的增益应当尽量大, 甚至带积分环节.
减小稳态误差的途径
- 提高反馈通道的精度, 避免在反馈通道引入干扰
- 系统稳定的前提下, 对于输入引起的误差, 可以增大系统的开环放大倍数(首选, 有差工作状态), 或者提示系统的型次(有显著副作用)
- 对于干扰引起的误差, 可以增大干扰点前的放大倍数(减小误差), 或者在干扰点前加积分器(消除误差)
MATLAB 在时域分析中的应用
求单位阶跃响应:
绘制响应曲线
step(sys)或step(sys, t)
step(num, den)或step(num, den, t)
求解响应数据
[y, t] = step(sys)或y = step(sys, t)
[y, t] = step(num, den)或step(num, den, t)
求单位脉冲响应:
绘制响应曲线
impulse(sys)或impulse(sys, t)
求解响应数据
[y, t] = impulse(sys)或y = impulse(sys, t)
求任意输入下系统的输出响应:
绘制响应曲线
lsim(sys, u, t)
u是给定输入构成的列向量, 即t时刻的输入值
求解响应数据
[y, t] = lsim(sys, u)或y = lsim(sys, u)
由于没有斜坡响应命令, 我们可以用s除G(s), 再求它的阶跃响应
总结
一阶系统的瞬态响应:
- 脉冲, 阶跃响应为对数型曲线, 稳态误差为0; 斜坡响应稳态误差为常数
- 稳定性, 快速性与准确性均与系统固有特性有关 (即与参数T有关); 仅准确性与输入信号的形式有关 (?)
二阶系统的瞬态响应:
主要分析欠阻尼状态以及单位脉冲响应
时域分析指标:
上升时间
峰值时间
超调量
调节时间
极点位置与瞬态响应特性的关系
高阶系统的性质及其简化方法
系统稳态性能分析
- 误差与偏差
- 静态位置误差系数, 静态速度误差系数, 静态加速度误差系数
![[ControlSystem] Ch5 控制系统的性能](/images/24-11/Screenshot%20from%202024-11-03%2020-56-31.png)
