学习控制理论课程PPT的记录.
根轨迹的基本概念
考虑下面的二阶系统的性能
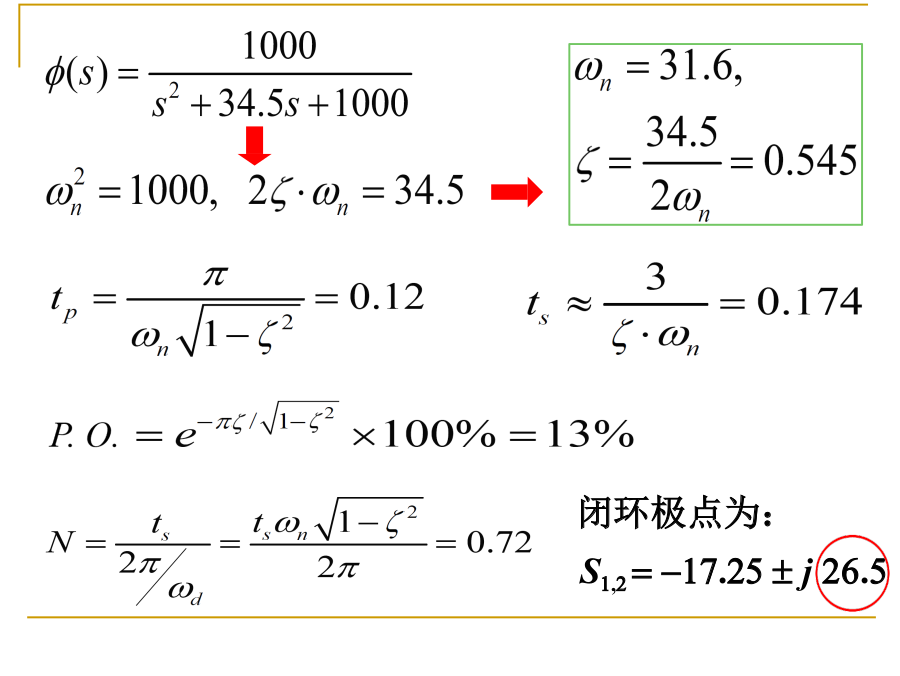
因此, 我们考虑一般的情况, “比例控制结构”, 并给出这个结构下, 参数变化对于系统性能的影响
- 给出特征方程的根, 根表示为包含参数的一般形式
- 考察参数K从零到无穷大时, 根的轨迹变化情况
约束条件: 考察某个极点是否会在轨迹上
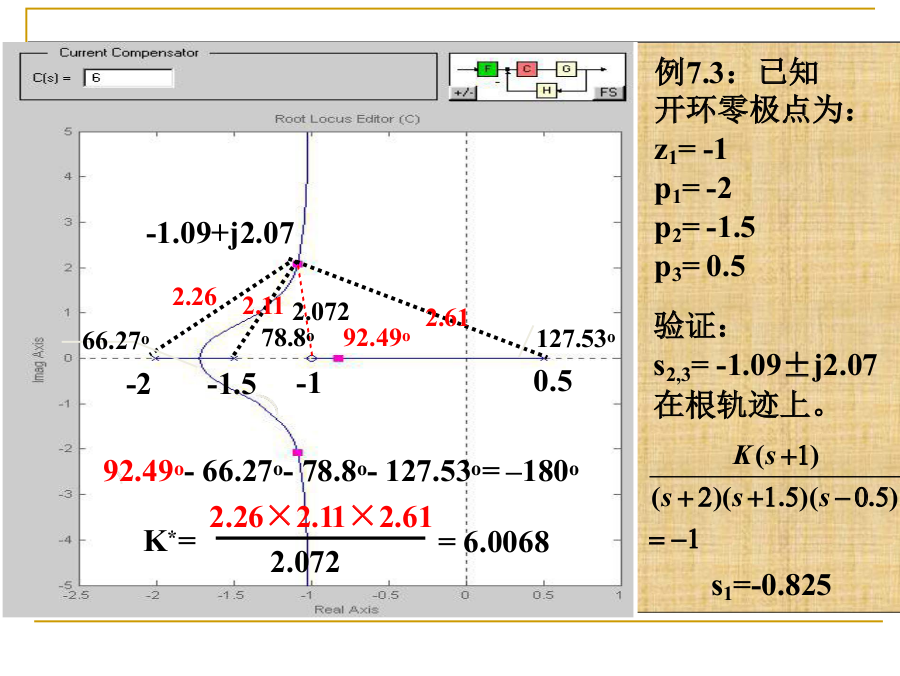
在轨迹上的点必须满足
于是, 将方程展开得到
同时, "零点角度"减去"极点角度"为 度. 其中零点, 极点角度为零极点指向 的向量的角度. (此处零极点为开环零极点)
- 相角条件决定了整条根轨迹, 即决定了哪些点是极点 (充要条件)
- 幅值条件决定了极点 的匹配增益值.
根轨迹绘制的基本方法
- 根轨迹的分支数: N阶系统有N个闭环极点. 根轨迹的分支数等于系统阶数, 也等于开环极点的个数
- 根轨迹的对称性: 关于实轴对称 (要么都是实根, 要么都是共轭复根)
- 根轨迹的起点: 起始于开环极点 (展开, 令 K趋于0即可得到)
- 根轨迹的终点: 终止于开环零点
- 实轴上的根轨迹段: 考察其右侧的开环零极点个数之和的奇偶性, 来判断相角和 (这是由于: 共轭开环零极点诱导的相角成对出现且和为360; 左侧实开环零极点相角为0. 因此只考虑右侧实零极点即可)
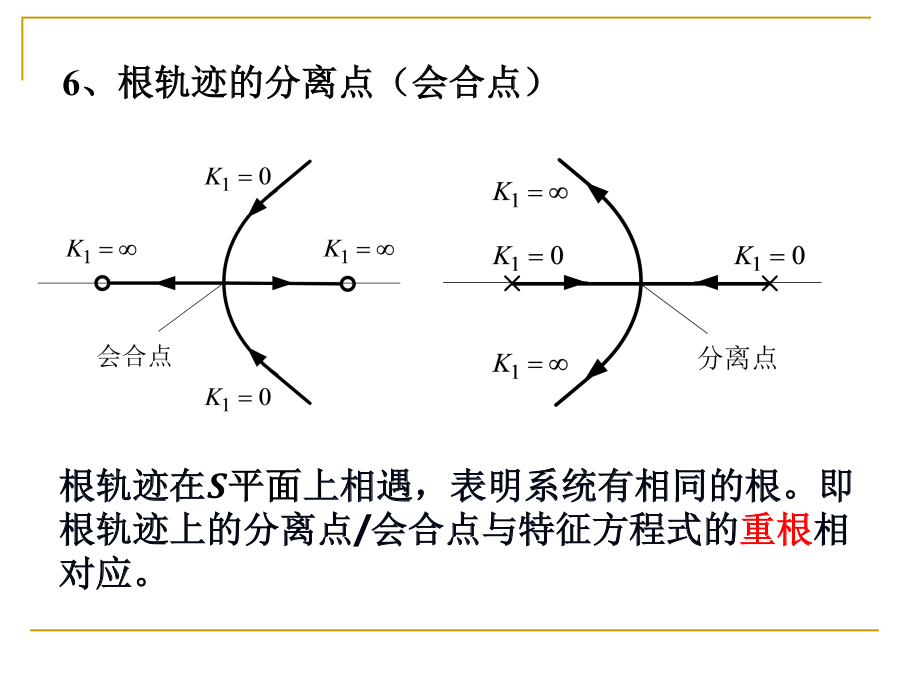
- 根轨迹的分离 / 会合点: 与特征方程的重根对应. 由于 , 因此可以得到: 匹配增益值函数分支在极点 的实定义域内单调增减, 且在分离点处取最大值, 在会合点处取最小值 (根据图像)
因此, 我们可根据必要条件
以及 且为实数的约束条件, 即可得到真正的分离点和会合点 (求出对应的 根)
- 根轨迹的渐近线
条根轨迹分支, 沿着一组渐近线趋于无穷远处. 它们共享一个渐近中心 (与实轴相交)
夹角为
渐近线平分360度. (180; 90, 270; 60, 180, 300; 45, 135, 225, 315; …)
- 根轨迹与虚轴的交点
A. 利用特征方程求解: 即, 待定系数法, 令 并求解特征方程, 得到对应的 和
B. 劳斯判据求解: 确定K在稳定性改变的临界点, 在带入特征方程求得 的值
总结: 给定特征方程, 绘制轨迹图
第一步: 确定起始和终止点, 即求解开环函数的零极点 (零点不存在时, 看作无穷)
第二步: 确定实轴上的根轨迹段
第三步: 确定分离点或会合点. 求解导数为零的根, 并代回特征方程, 舍去 的解.
第四步: 确定渐近线. 根据公式确定倾角和渐进中心
第五步: 确定轨迹与虚轴交点. 根据特征方程待定系数法求得.
第六步: 用平滑曲线, 将分离/会合点向渐近线靠近, 并补全实轴部分.
- 根轨迹的入射角和出射角
- 当开环零极点为实数时, 根轨迹沿实轴发展, 不考虑入射角 / 出射角
- 当开环零极点为复数时, 将根轨迹离开复极点的角度称为出射角, 将趋于复极点的角度称为入射角
当根轨迹点趋于开环零极点时, 依然满足相角和的性质, 同时轨迹点 与开环零极点的角度, 等价于趋近的点 与其他零极点的角度. 于是根据这个可求解出入射角和出射角
小结: 对于典型控制结构"比例控制", 我们可以绘制其根轨迹图, 从而刻画调节 时, 极点位置和系统性能变化的全貌.
基于根轨迹的控制系统分析
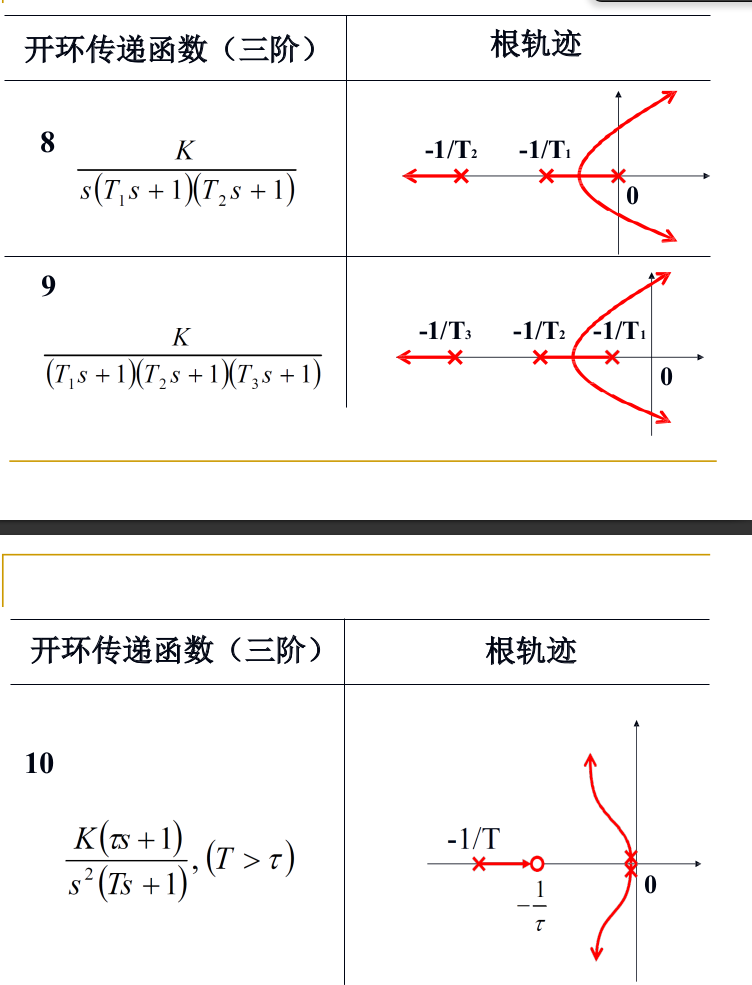
典型传递函数的根轨迹分析:
一二阶可直接根据方程解的一般形式得到
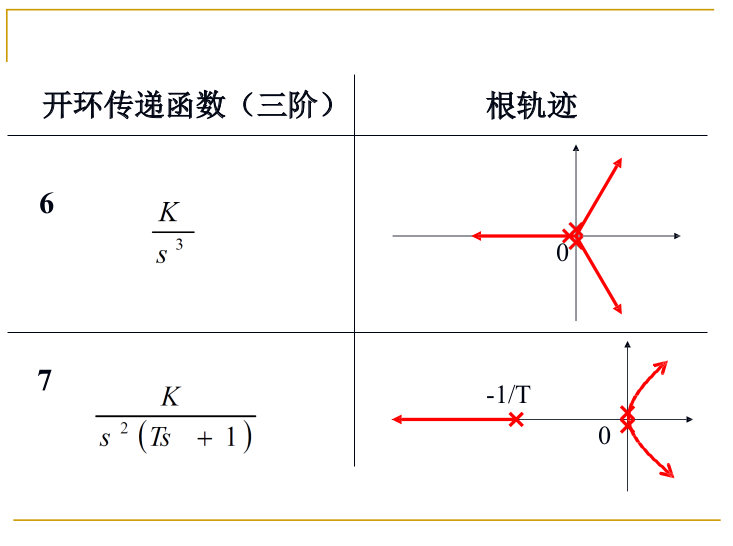
三阶可根据渐近中心和渐近线得到.
例子: 参数设计与分析
- 闭环系统稳定: 要求极点位于左半平面
- 稳定的欠阻尼系统: 包含复极点
- 主导为二阶系统的参数取值范围 (10倍): 满足极点距离的十倍关系
广义根轨迹
根据等效开环函数, 将想要调节的参数放到开环传递函数上方, 且位于系数位置, 之后正常进行考察.
控制器对根轨迹的影响
在前端添加控制器:
大致分为三类
- 比例控制
- 微分控制
- 积分控制
三类控制器对二阶系统根轨迹的影响:
微分型控制器 , 系统变为
结论: 增加合适的开环零点(足够右侧), 可以使根轨迹产生向左弯曲的倾向(弯曲靠近新添加的零点, 产生复根), 有利于提高系统稳定性和阻尼系数
积分型控制器 , 系统变为
结论: 增加开环极点, 可以使根轨迹产生向右弯曲的倾向(渐近线从两条变成三条, 新极点的值影响渐近中心的值), 不利于系统稳定性, 但有利于稳态精度(型次变大)
综合型控制器 , 系统变为
结论: 左侧的零 / 极点 占上风. 当零点占上风时, 轨迹向左弯曲; 极点占上风时, 轨迹向右弯曲.
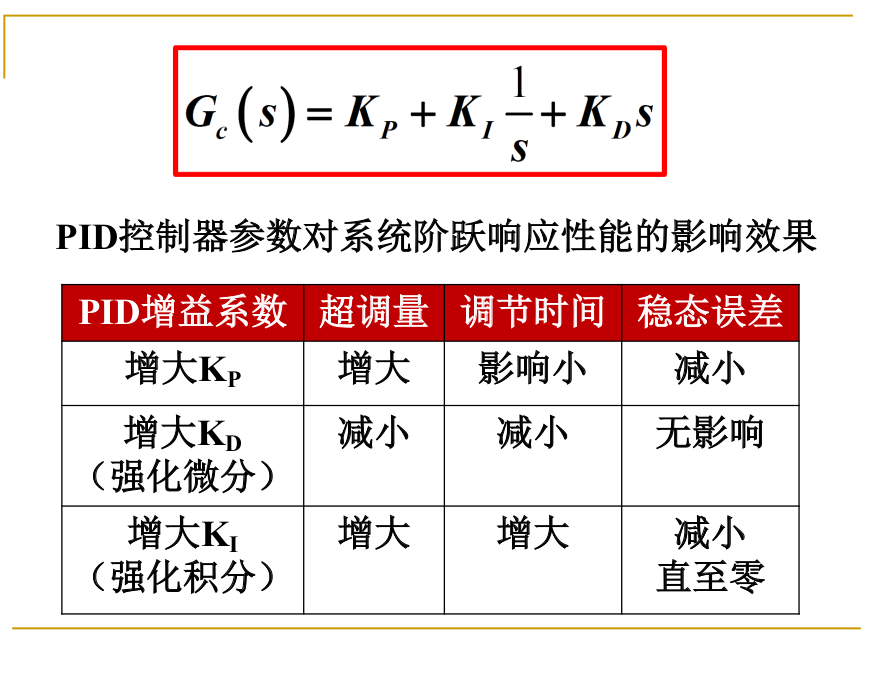
各种参数改变和系统性能的关系 (根据指标的等价线来记忆)
增大比例系数:
- 超调量增大,
- 调节时间不变,
- 稳态误差减小,
- 稳定性不变。
增大纯微分系数:
- 出现过阻尼,
- 调节时间变大,
- 稳态误差不变,
- 稳定性变差。
增大纯积分系数:
- 超调量增大,
- 调节时间变大,
- 型次变大,改善稳态误差,
- 稳定性变差,直至失稳。
PID控制器
基于根轨迹的控制系统设计
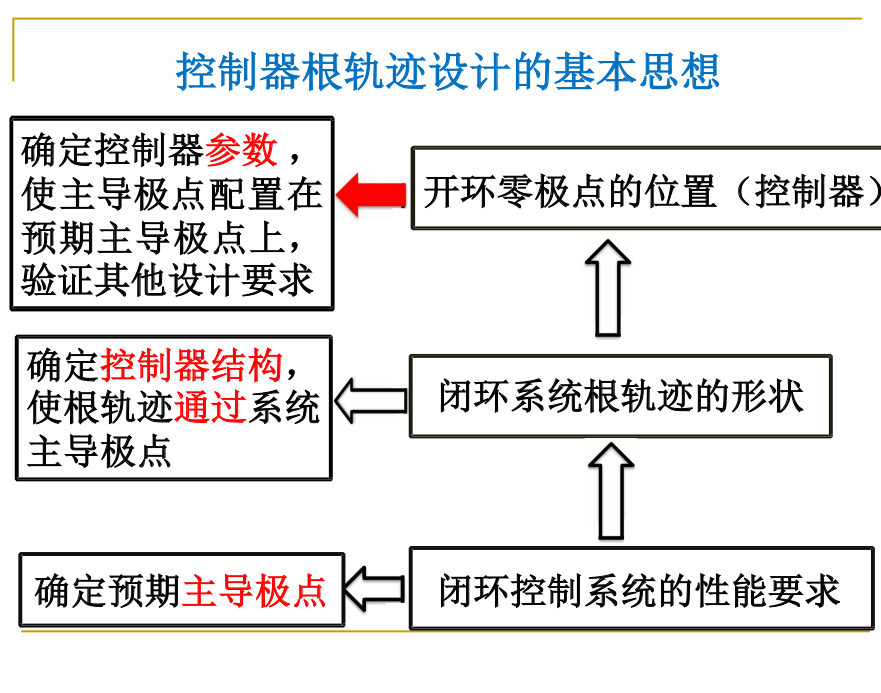
- 先分析性能要求, 得到零极点的可行域, 导出预期零极点
- 得到未矫正系统根轨迹图, 分析是否能配置到预期零极点上
- 确定控制器参数, 使主导极点配置在预期主导极点上, 同时考察此时各种指标是否符合
- 施加前置滤波器
课件中的三个实例.
MATLAB在根轨迹中的应用
绘制根轨迹
分析根轨迹
控制器设计
