学习控制理论课程PPT的记录.
引言
线性系统的能控性和能观性
能控性:
若存在无约束的控制信号 u(t), 能使系统从任意一个初始状态 x(t0)转变到另一个预期状态 x(t),t0≥t≥T, 这称该系统是完全能控的. (能控制系统转移到指定状态)
判别方法:
能控性秩判据: 对于n维连续时间线性时不变系统, 系统完全能控的充要条件为能控性判别矩阵 Pc满秩, 即
rank(Pc)=n,Pc=[B,AB,A2B,...,An−1B]
能观性:
当且仅当存在有限时间 T, 给定控制变量 u(t),0≤t≤T之后, 可以由 y(t)在 [0,T]上的观测值确定系统的初始状态 x(0), 则称系统是完全能观的. (能从输出的外在观测反推出内部状态)
能观性秩判据: 对于n维连续时间线性时不变系统, 系统完全能控的充要条件为能观性判别矩阵 Po满秩, 即
rank(Po)=n,Pc=[C,CA,CA2,...,CAn−1]T
线性系统的全状态反馈控制器设计
基于状态反馈的极点配置方法:
反馈量不再是 Hy, 而是 Kx.
此时假设反馈需要的所有状态变量都可以直接测量.
当输入量 r=0时, 系统为全状态反馈控制器. 输入信号 u=−Kx, 状态方程为 x˙=Ax+Bu.
闭环系统状态方程为 x˙=(A−BK)x
极点配置设计的问题在于: 选择合适的矩阵 K, 将闭环系统状态矩阵 A−BK的特征值(即闭环控制系统的极点)配置到预定的位置
阿克曼公式:
K=[0,0,...,1]Pc−1q(A)
其中
Pc为能控性矩阵
q(A)为关于 A的多项式. 系数与期望的闭环系统的特征方程的系数相同.
设计步骤:
- 求解能控性矩阵 Pc, 并检验系统的能控性
- 根据性能要求确定预期的观测器特征方程 q(λ)
- 采用阿克曼公式确定增益矩阵 K
线性系统的状态观测器设计
在状态量无法直接观测的情况下, 使用观测器来估计状态变量.
x^˙=Ax^+Bu+L(y−Cx^)
其中 L为观测器增益矩阵, 是观测器设计的核心.
对于估计误差 e=x−x^, 我们有
e^=(A−LC)e
状态观测器的特征方程
det[λI−(A−LC)]=0
阿克曼公式:
K=P(A)Po−1[0,0,...,1]T
其中
Po为能观性矩阵
P(A)为关于 A的多项式. 系数与期望的闭环系统的特征方程的系数相同.
设计步骤:
- 求解能观性矩阵 Po, 并检验系统的能观性
- 根据性能要求确定预期的观测器特征方程 p(λ)
- 采用阿克曼公式确定状态观测器增益矩阵 L
带有观测器的全状态反馈控制器
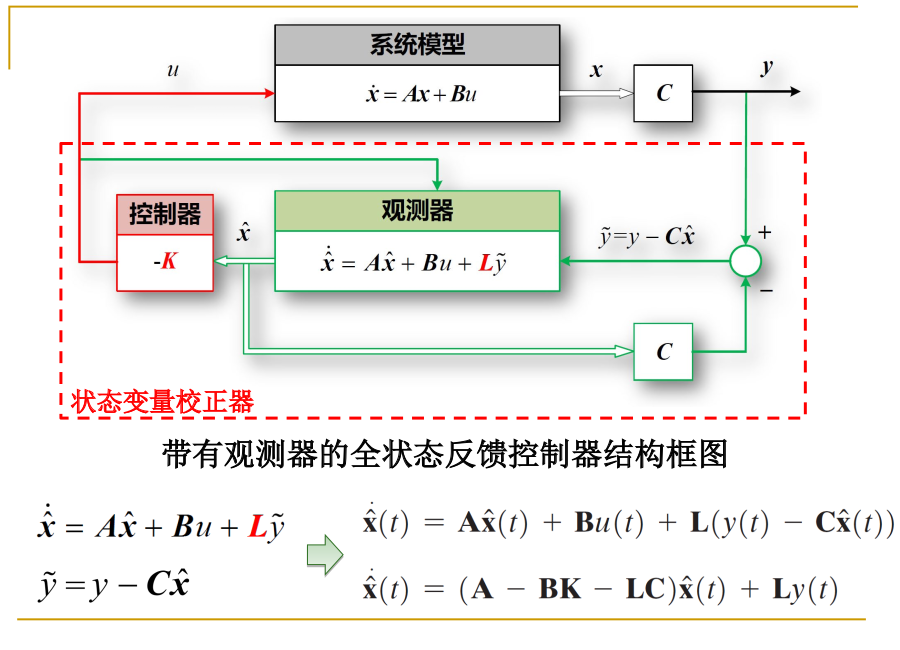
将观测器的结果作为全状态反馈.
方程为
x^˙=Ax^+Bu+Ly^,y^=y−Cx
于是
x^˙(t)=(A−BK−LC)x^(t)+Ly^(t),u(t)=−Kx^(t)
得到
e˙=x˙−x^˙=(A−LC)e
x˙=(A−BK)x+BKe
对应的特征多项式为
det(λI−(A−BK))det(λI−(A−LC))
于是, 可以独立设置状态反馈控制器和状态观测器.
步骤:
- 根据系统性能要求确定反馈增益矩阵 K
- 根据观测器性能要求确定 状态观测器增益矩阵L
- 集成观测器和全状态反馈控制器. 得到矫正器的传递函数为
U(s)=[−K(sI−(A−BK−LC))]−1Y(s)
借助MATLAB设计状态变量反馈
利用函数ctrb判断用状态空间模型描述的系统的能控性:
Pc = ctrb (A, B)
A是系统矩阵, B是输入矩阵, Pc 是能控性矩阵
利用函数obsv判断用状态空间模型描述的系统的能观性:
Po = obsv (A, C)
A是系统矩阵,C是输入矩阵,Po是能控性矩阵`
计算增益矩阵𝑲: 利用函数acker计算增益矩阵𝑲 K = acker(A, B, P)
