![[RL] PyTorch实现RL框架算法 及 DQN](/images/24-11/DQNs.png)
前两天折腾了一下DQN, 但是很杂乱. 今天打算干干净净地把DQN给做了.
DQN
[!question]
DQN是什么?
具体参照之前的Blog RL 第七讲 深度强化学习
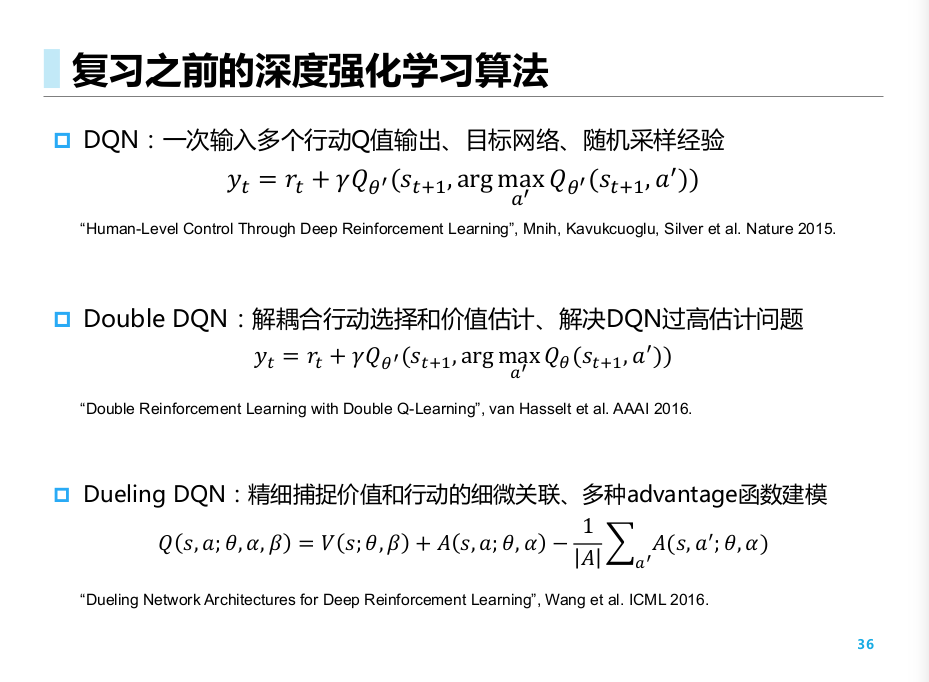
简单来说, DQN全名深度Q网络(Deep Q Network), 即引入了深度神经网络进行近似的Q学习.
关于Q-learning:
- Q学习是价值迭代的方法, 它通过一个行动策略进行采样, 然后对目标策略进行优化(这些策略并不显式给出, 而是隐含在Q-function中. ). Q-Learning的方法不需要重要性采样. 而且它是离线的学习方法(收集数据的策略和优化的目标策略不同)
- 详细见 RL 第四讲 无模型控制方法
关于DQN: - 它使用神经网络来近似Q-function
- 为了避免样本不满足独立分布, 它加入了一个buffer. 在buffer中进行采样.
- 为了减小参数的更新频率, 引入了双网络结构(实际上在原本的Q-learning当中, 天生就支持双网络, 只要采样策略具有随机性即可. 但是一般采用同一个Q函数生成的两个不同策略作为采样策略和优化目标. )
同时, 我们还可以
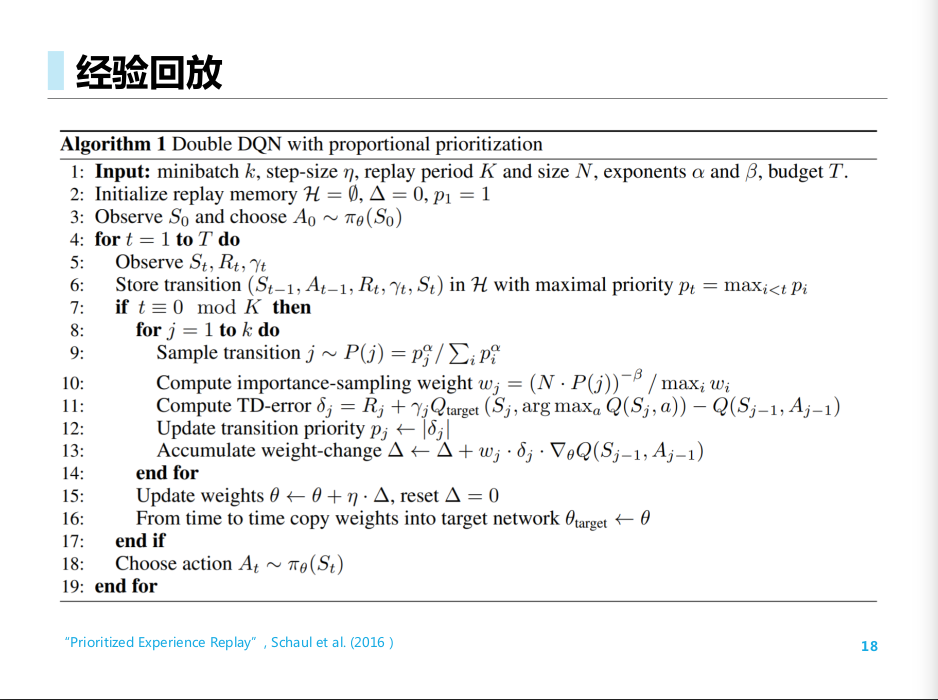
- 引入优先经验回放, 加上重要性采样, 使得算法的表现更优.
- 引入Double DQN, 做max操作时用上两个网络. (更改训练步骤)
- 引入Dueling DQN, 在建模Q函数的时候采用A和V的组合完成. (更改初始网络建模)
于是, 算法的架构为:
1 | # 初始化建模神经网络 |
DPG, DDPG
Actor-Critic模式加上深度神经网络的结果
具体可参见 RL 第六讲: 价值和策略近似逼近方法
AC模式已经是神经网络近似的方法了.
对于Critic:
Q不断拟合当前分布下的Q; 不断拟合当前Q下的最优策略.
对于DDPG, 它是面对复杂问题时, 添加了各种优化组件的DPG. 各种组件包括
- 经验重放 (离线策略)
- 目标网络
- 在动作输入前批标准化Q网络
- 添加连续噪声
算法:
- 四个网络, 分别为行动估值, 行动策略, 目标估值, 目标策略
- 执行动作时, 始终有一个高斯噪声
- 从buffer中采样得到minibatch
- 按照目标网络进行目标估值
- 按照上面的目标更新行动网络
- 按照策略梯度更新行动策略 网络
- 也许可以考虑加上
priority pool. 但是优先级的值貌似不太好确认.
相关的一些杂项知识
通过一组下标, 访问对应元素
在 PyTorch 中,如果你有一个数组和一组下标,可以使用 torch.gather 或直接索引操作来获取对应元素。以下是两种方法:
方法 1:直接索引操作
如果你有一个一维数组和一组下标,可以直接使用下标列表或张量进行索引:
1 | import torch |
方法 2:torch.gather(用于多维张量)
torch.gather 可以在多维张量中使用,适用于复杂情况。
1 | arr = torch.tensor([[10, 20, 30], [40, 50, 60]]) |
在这种情况下,indices 的形状要与目标结果的形状一致,并指定 dim 参数来指明在第几维度进行索引。
